SCARA robots YKX series
Completely eliminating belts and further strengthening drive systems realizes the industry's shortest cycle time.
Specification
| YKX250 | YKX400 | YKX600 | YKX800 | YKX1000 | |||
|---|---|---|---|---|---|---|---|
| Axis Specifications | X Axis | Arm Length (mm) | 75 | 225 | 350 | 450 | 650 |
| Rotation Angle (°) | ±130 | ±140 | ±130 | ||||
| Y Axis | Arm Length (mm) | 175 | 250 | 350 | |||
| Rotation Angle (°) | ±150 | ±165 | |||||
| Z Axis | Stroke (mm) | 200 | 200 / 450 | ||||
| R Axis | Rotation Angle (°) | ±360 | |||||
| Motor Output (W) | X Axis/Y Axis/Z Axis/R Axis | 750 / 400 / 400 / 320 | |||||
| Maximum Speed | X-Y Axis Synthesis (m/s) | 4.9 | 6.2 | 8.8 | 11.2 | 12.9 | |
| Z Axis (m/s) | 2.8 | ||||||
| R Axis (°/s) | 1020 | ||||||
| Repeatability *1 | X-Y Axis (mm) | ±0.01 | ±0.02 | ||||
| Z Axis (mm) | ±0.01 | ||||||
| R Axis (°) | ±0.004 | ||||||
| Maximum Payload (kg) | 8 | 21 | |||||
| Standard Cycle Time (s)*2 | 0.28 | 0.28 | 0.33 | 0.34 | 0.38 | ||
| R Axis Allowable Inertia (kgm2)*3 | 1.05 | ||||||
| Wiring | IO1*4 | 0.15sq x 12 (no shield, straight) | |||||
| IO2*5 | 0.2sq x 6 (no shield, straight) | ||||||
| IO3*5 | 0.15sq x 8 (shielded, twisted pair) | ||||||
| Ethernet Cable*4 | 00.15sq x 8 (shielded, twisted pair) | ||||||
| Lighting Cable*4 | 0.5sq x 4 (no shield, straight) | ||||||
| Piping (outer diameter) | φ4 mm x 2 *4 φ6 mm x 2 *4 |
||||||
| Motion Limit Settings | 1.Soft limit 2. Mechanical stopper (X, Y, Z axes) | ||||||
| Supplied Cable (m) | 3、6、15 | ||||||
| Unit Weight (kg)*6 | 25 | 26 | 33 | 34 | 36 | ||
- *1:
- Values under constant ambient temperature
- *2:
- When reciprocating 300mm horizontally and 25mm vertically while conveying 2kg with rough positioning in an arch motion
- *3:
- It is necessary to limit parameters such as acceleration rate to suit allowable inertia
- *4:
- Connected to the main unit rear surface and Y arm upper surface plate
- *5:
- Connected to the main unit rear surface and Y arm inner stay
- *6:
- Does not include the weight of the robot connection cable
YKX series
Related contents
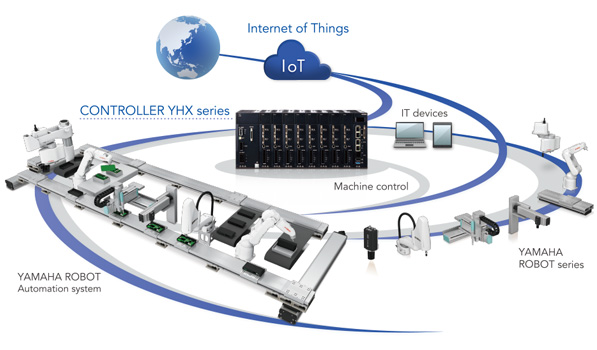
- Advanced Robotics Automation Platform

- The new YAMAHA integrated control robot system that realizes the quick, efficient, low cost construction of automated manufacturing lines.

- Universal Controller YHX series
- YAMAHA's Advanced Robotics Automation Platform realizes cooperative motions and synchronized control among all the robots, peripheral units and devices that make up an automated line.

- SCARA robots YKX series
- Completely eliminating belts and further strengthening drive systems realizes the industry's shortest cycle time.

Robotics Business Unit
Sales & Marketing Section
FA Sales & Marketing Division
127 Toyooka, Chūō-ku, Hamamatsu, Shizuoka 433-8103, Japan
Telephone +81-53-525-8350 /
Facsimile +81-53-525-8378