Dedicated for RCX340 / RCX341 Speed Monitoring Unit RCX3-SMU
Introduces RCX3-SMU.

Dedicated for RCX340 / RCX341 Speed Monitoring Unit RCX3-SMU
In recent years, safety awareness has been on the rise, particularly in Europe, and ensuring safety has become an increasingly important perspective.
The RCX3-SMU is the first Yamaha robot-related product that has acquired the functional safety certification.
Yamaha Robot Controller "RCX340 / RCX341" can be connected to the dedicated optional unit "RCX3-SMU" to support functional safety.
- Supported Controller:
RCX340-S / RCX341-S *YC-Link/E not supported - Target robots:
Standard robot with 3 or more axes that can be connected to RCX340 / RCX341
(Some multi-robots are not compatible. Please contact YAMAHA sales for details.)
Feature
Third-party certification by TÜV SÜD.
- Compatible standards
-
- Safety Standards for Industrial Robots
ISO10218-1:2011 - Standards for Functional Safety of Machinery
IEC 62061:2021 - Functional Safety Standards
EN ISO 13849-1:2015
- Safety Standards for Industrial Robots
Protective stop
Unlike an emergency stop, which stops the entire device, a protective stop allows you to stop only a single robot. This makes equipment recovery easier and leads to improved production efficiency.
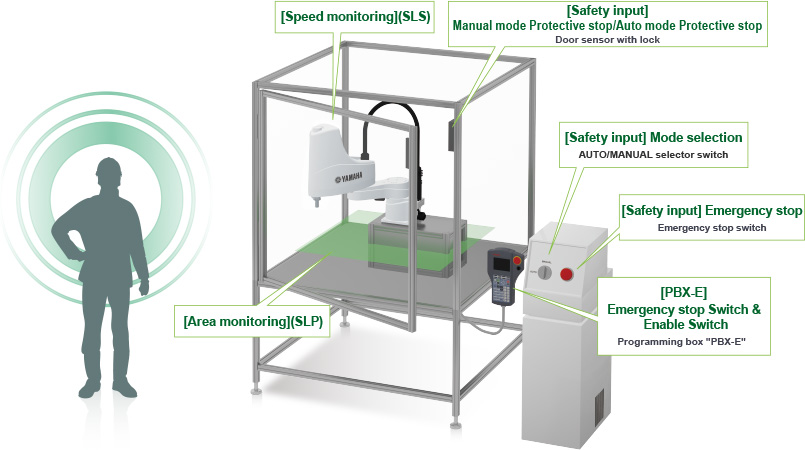
List of safety functions
| Functions | Descriptions |
|---|---|
| STO | Shuts off the main power supply of the controller and shifts to a safety status |
| SS1-r/t | Monitors the deceleration stop of the robot, and executes <SF001>STO if it deviates from the deceleration conditions specified by the parameter. |
| Speed monitoring (SLS) | Monitors whether the robot speed deviates from the value specified by the parameter, and executes <SF002>SS1-r/t if it deviates. |
| Area monitoring (SLP) | Monitors whether the robot position deviates from the range specified by the parameter, and executes <SF002>SS1-r/t if it deviates. |
| PBX-E Emergency stop Switch | Monitors whether the emergency stop switch on the programming box is pressed, and executes <SF002>SS1-r/t if it is pressed. |
| PBX-E Enable Switch | Monitors whether the enable switch on the programming box is at the center position during the manual mode, and executes <SF002>SS1-r/t if it is not. |
| Safety input (Emergency stop) | Monitors the input of emergency stop contact from an external device, and executes <SF002>SS1-r/t when the contact is open. |
| Safety input (Mode selection) | Monitors the status of the Auto mode signal and Manual mode signal from an external device. If the status is changed, <SF002>SS1-r/t will be executed to change the operation mode. |
| Safety input (Manual mode Protective stop) | Monitors whether the contact of an external device is closed during manual mode, and executes <SF002>SS1-r/t if it turns open. |
| Safety input (Auto mode Protective stop) | Monitors whether the contact of an external device is closed during automatic mode, and executes <SF002>SS1-r/t if it turns open. |
| Safety input (Auto mode Speed monitoring) | Monitors whether the contact of an external device is closed during automatic mode, and if it turns open, enables <SF003> Speed Monitoring even in automatic mode. |
| Safety input (Area monitoring) | Monitors whether the contact of an external device is closed, and if it turns open, enables <SF004> Area Monitoring. |
| Safety output | Selects and outputs the status of RCX3-SMU among emergency stop status/safety status/operable status/automatic mode status. |
Easy setup with support software
All settings for RCX3-SMU can be set up using the support software "RCX-Studio 2020".
Parameter adjustment, settings, and backup of the RCX3-SMU can be performed intuitively within one application.
Setting the monitoring area
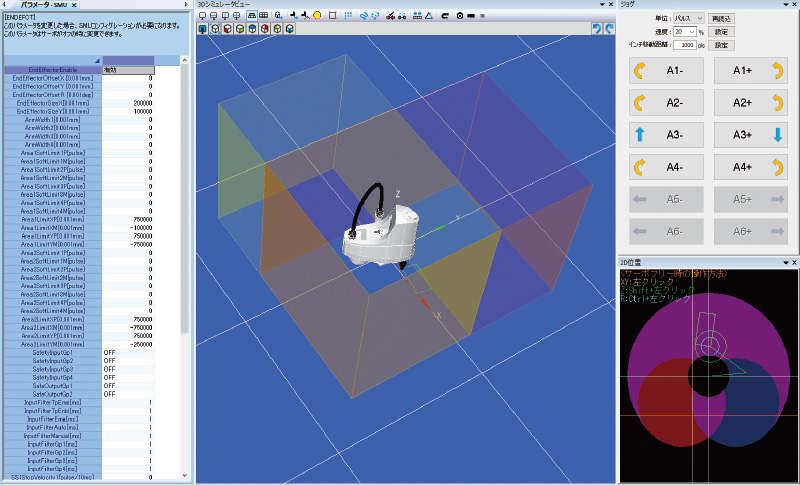
- The monitoring area can be confirmed on the 3D simulator.
- You can adjust the area while checking the robot's installation layout and operation.
- Adjustments can be made offline without the robot and SMU.
*The above image is under development and subject to change.
*When setting up the SMU, please use an Ethernet cable as the communication cable between the PC and the controller.
Parameter settings for safety functions
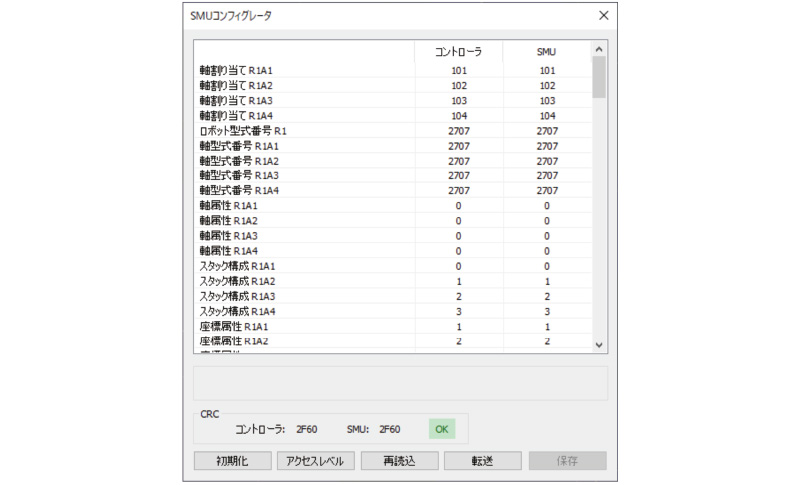
SMU parameters can be set from the SMU configurator.
Support software
RCX-Studio2020
Both RCX-Studio 2020 Basic and RCX-Studio 2020 Pro software can be downloaded from the website.
*A dedicated USB key is required to use the functions of RCX-Studio2020 without restrictions.
*Compatible with RCX-Studio2020 Ver.3.3.0 or later
Caution

It is the customer's responsibility to implement appropriate safety measures for equipment that uses robots.
Simply installing the RCX3-SMU will not prevent damage to people or equipment.
Please perform risk assessment and countermeasures.
Various data
Dedicated for RCX340 / RCX341 Speed Monitoring Unit RCX3-SMU
Related contents



Robotics Business Unit
Sales & Marketing Section
FA Sales & Marketing Division
127 Toyooka, Chūō-ku, Hamamatsu, Shizuoka 433-8103, Japan
Telephone +81-53-525-8350 /
Facsimile +81-53-525-8378