


What is MOTOBOT?
Yang membuat project MOTOBOT unik adalah pendekatannya terhadap pengoperasian sepeda motor secara otomatis sepenuhnya. Berbeda dengan metode saat ini yang digunakan untuk sistem pengemudi otomatis pada mobil, yang sudah dikembangkan dalam beberapa tahun terakhir, dimana tujuannya adalah agar robot humanoid dapat mengoperasikan kendaraan tanpa modifikasi untuk dikendarai secara otonom.
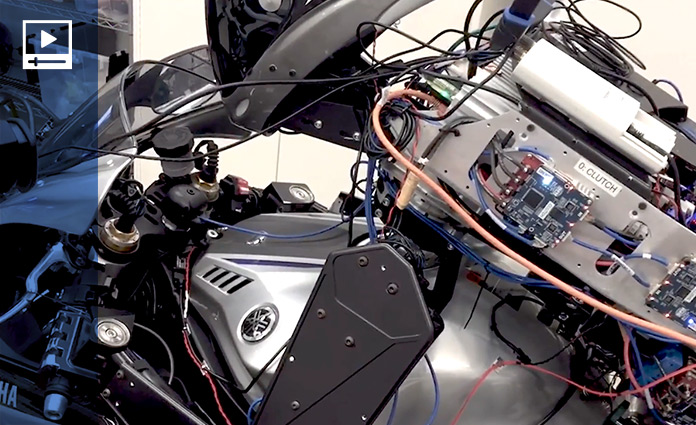
Berdasarkan data kecepatan sepeda motor, rpm mesin, karakter mesin,dll., MOTOBOT akan mengontrol 6 buah aktuatornya (*) untuk dapat mengendarai sepeda motor secara otomatis..Ke depannya, teknologi untuk machine position recognition (GPS ber-akurasi tinggi, berbagai sensor, dll.) dan machine learning akan dimanfaatkan untuk membuat MOTOBOT mampu menentukan best line untuk melintasi track balap dan batas performa sepeda motornya sehingga dapat meningkatkan lap time secara berturut-turut. Dari project ini, kita akan mampu memvisualisasikan cara pengoperasian sepeda motor seseorang, menyimpulkan hubungan antara rider input dan karakter mesin, dan kemudian menggunakan hasil pengetahuan tersebut dalam pengembangan kendaraan untuk menciptakan “Kando” yang lebih besar lagi. Dan juga, dengan mengubah program kontrol dan bentuk mekanisme pengoperasian MOTOBOT seperlunya, kami harap MOTOBOT juga akan mampu beradaptasi untuk mengendarai kendaraan lain seperti watercraft dan snowmobile.
* Untuk mengoperasikan kemudi, handle gas, rem depan, rem belakang, tuas kopling, dan pedal pemindah gigi
Teknologi MOTOBOT
Di masa yang akan datang, kemungkinan MOTOBOT akan tercipta.
Dengan menggunakan teknologi MOTOBOT untuk mengoptimalkan kontrol kendaraan yang dinamis, kami akan mengembangkan performa yang lebih tinggi dan bentuk mobilitas yang lebih aman.

MOTOBOT menyatukan teknologi Yamaha Motor yang didapat dari pengembangan sepeda motor (pengetahuan tentang dinamika kendaraan, electronic control, dll.) dengan teknologi yang dikumpulkan dari pengembangan industri robot kami (robot control, dll.).

Berbagai jenis aktuator yang melakukan pengendalian saat riding dikontrol secara tepat dan dapat mengendalikan sepeda motor sama seperti pengendara sepeda motor (manusia).

Dengan memperbaiki algoritma untuk mengoperasikan mekanisme yang dibutuhkan saat riding dengan kecepatan tinggi dan perangkat tambahan lainnya, yang pada akhirnya akan mengarah pada peluang terciptanya teknik riding tingkat tinggi lainnya.
Target

Tujuan : Riding di track lurus hingga kecepatan tertinggi 100km/jam, melaju dengan teknik slalom, dan menikung.

Tujuan : Menyimpulkan syarat yang dibutuhkan agar mampu riding melebihi kemampuan manusia; yaitu dapat melaju di track balap dengan kecepatan 200km/jam atau lebih.


Tujuan : Menggunakan teknologi dasar yang diperoleh melalui pengembangan MOTOBOT, seperti robot control dan human-machine interface creation, sebagai titik awal R&D untuk terus-menerus menciptakan nilai baru.
Inovasi terbuka
MOTOBOT adalah project inovasi dan riset terbuka yang bekerjasama dengan lembaga riset terdepan dunia SRI International, yang bertujuan untuk menjelaskan tujuan tinggi dan unik yang dipresentasikan oleh project ini.

