


What is MOTOBOT ?
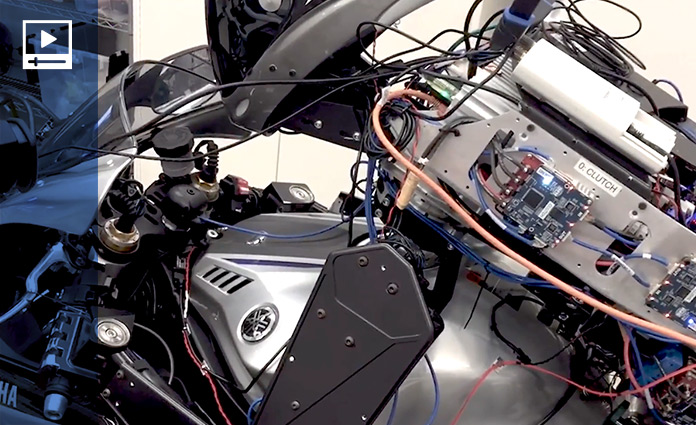
MOTOBOTの特長は、完全自動運転化におけるアプローチとして、近年取り組まれている自動車の自動運転化の方法とは異なり、乗り物本体は改造せず、ヒト型ロボットが通常の車両を運転するところにあります。MOTOBOTは、スピード・エンジン回転数・姿勢などの情報を元に、搭載した6つのアクチュエータ(※)を制御し、自律的な車両の運転操作を行ないます。今後は自車位置を認識する技術(高精度GPSや各種センサなど)や機械学習により、サーキットコースの最適ラインやマシン性能の限界をMOTOBOT自らが判断し、走行を重ねることでラップタイムを向上させていきます。これらにより、車両を操作・運転する人側の情報の可視化、およびそれに対する車両の挙動の関係性を解明し、より感動を与えられる車両開発に生かします。また、MOTOBOTは制御プログラムや操作部の形状を乗り物に応じて変更することで、マリンジェットやスノーモービルなどの他のビークルへの展開も期待できます。
※ステアリング・アクセル・フロントブレーキ・リアブレーキ・クラッチ・シフトペダルを操作
MOTOBOTの技術
MOTOBOTがもたらす
未来の可能性
モビリティの運動制御を最適化し、
より高性能、より安全なモビリティを開発
無人運転ロボットの開発

モーターサイクルの車両運動力学と電子制御技術、そして産業用ロボットで培った制御技術を融合させています。

運転操作を行なう各種アクチュエータを緻密に制御し、人間と同様にモーターサイクルを操縦できます。

高速サーキット走行に必要な機構を活用したアルゴリズムの改良などにより高度な走行を可能にしていきます。
ロードマップ


最高100km/hの直進走行、スラローム走行、旋回走行を達成します。


人間の運転を上回るパフォーマンスの要件を解明し、最高速度200km/h以上でのサーキット走行を目指します。


MOTOBOT開発で得たロボティクスやHMIなどの要素技術をベースに、ヤマハの新しい価値創造のための研究開発を継続します。
オープンイノベーション
MOTOBOT開発はオープンイノベーション型のプロジェクトとして進めており、世界を主導する研究・技術開発機関であるSRIインターナショナルをユニークかつ高い目標にチャレンジする当プロジェクトにふさわしいパートナーと位置付けて、共同開発を行っています。

