로봇 비전 RCXiVY2+ 로봇 일체형
야마하만이 실현 가능한 로봇 일체형 비전 시스템
간단한 조정
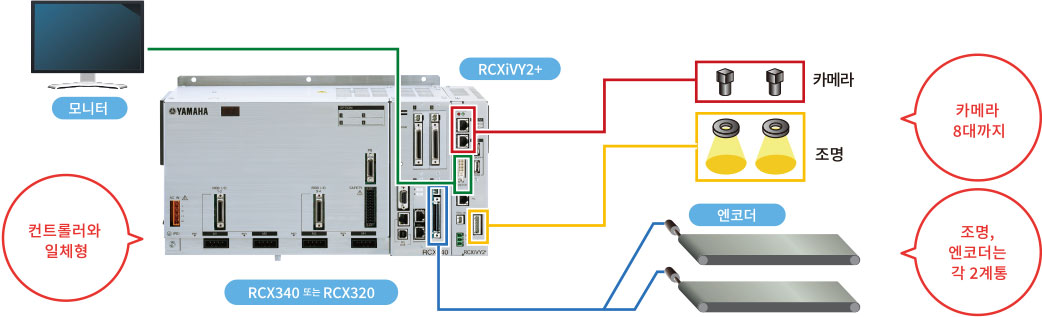
01로봇 컨트롤러와 일체형
일반적인 로봇 비전
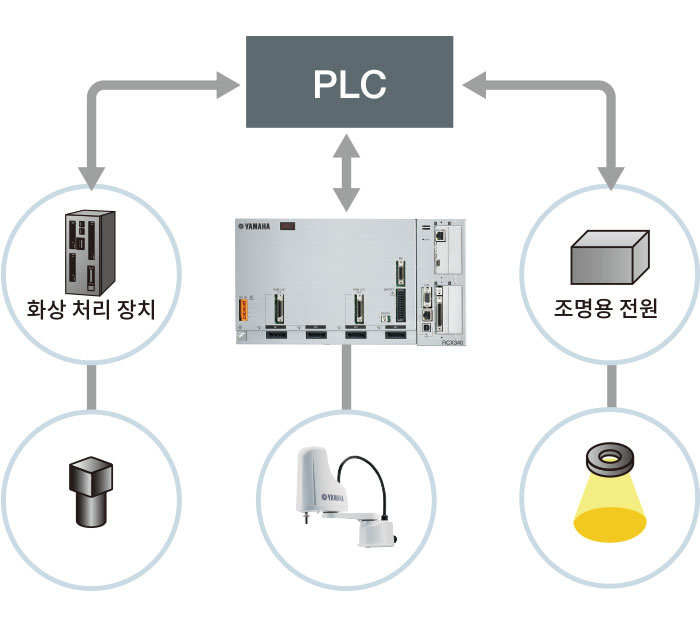
- 1
- 로봇좌표와 카메라좌표의 일치가 어려움
- 2
- 카메라가 이동할 경우 보정 계산이 필요
- 3
- 통신 시간에 따른 카메라와 로봇의 동작 편차 발생
- 4
- 통신 형태의 조정이 필요
RCXiVY2+시스템
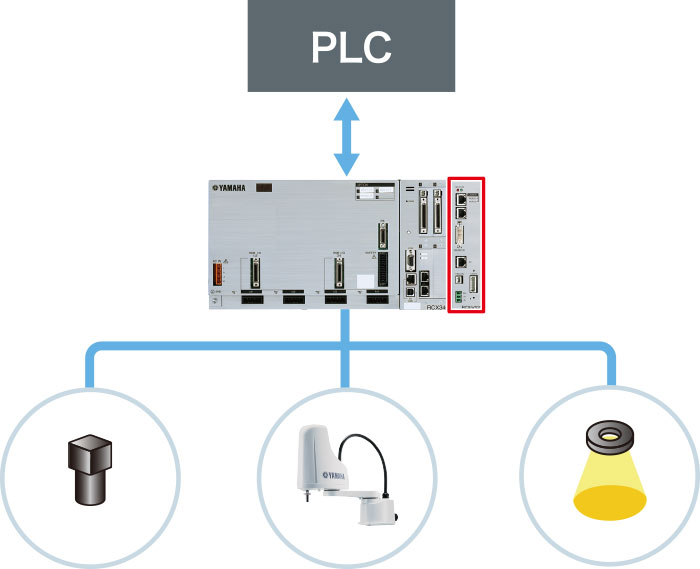
- 1
- 간단 캘리브레이션 기능 탑재
- 2
- 카메라가 이동해도 좌표는 자동 보정
- 3
- 전용 버스 라인으로 고속 접속
- 4
- 컨트롤러가 내장된 일원 조작
- 5
- 풍부한 로봇 라인업 전 기종 대응
02프로그램 커맨드의 예
【VSEARCH】지정한 카메라로 임의의 품종을 검색한다
검색에 사용하는 카메라나 품종, 사용하는 캘리브레이션 데이터 등이 커맨드 하나로 전환 가능.
【VGETPOS】검출한 워크의 좌표를 취득한다
검출한 결과는 다이렉트로 포인트 좌표에 대입 가능합니다.
* VGETPOS에 대입되는 순서는 1) 스코어 순서 2) X 좌표 3) Y 좌표에서 선택 가능
【LVOLUME】조명 광량을 0~100%로 지정
검색 시의 조명 밝기도 커맨드 하나로 변경 가능. 조명 조건을 변경한 후의 재검색도 간단합니다.





로봇 비전 RCXiVY2+ 로봇 일체형

YAMAHA MOTOR CO., LTD.
Robotics Business Unit
Sales & Marketing Section
FA Sales & Marketing Division
127 Toyooka, Chūō-ku, Hamamatsu, Shizuoka 433-8103, Japan
전화. +81-53-525-8350 /
팩스. +81-53-525-8378
[Head Office]
2500, Shingai, Iwata, Shizuoka, 438-8501, Japan