멀티 로봇
복수의 단축 로봇을 한 대의 컨트롤러로 제어하는 멀티 사양!

특징
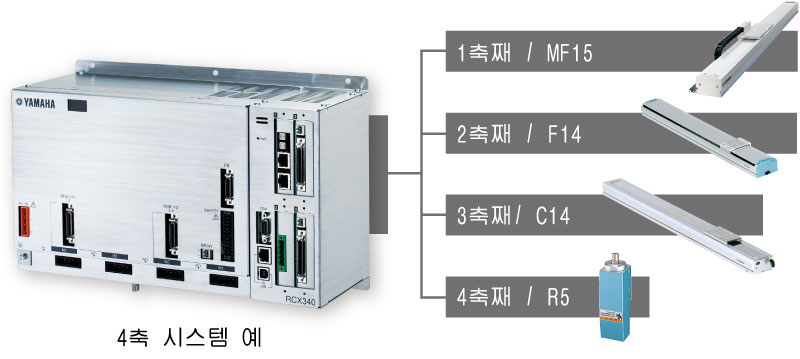
01여러 대의 단축 로봇을 한 대의 컨트롤러로 제어하는 멀티 사양!
- 시퀀스 제어가 간단! 저가로 용이한 시스템 업그레이드
- 단축 컨트롤러를 여러 대 사용하는 것보다 컴팩트하고 공간 절약
- 고도의 제어가 가능
- RCX320, RCX340에서는 FLIP-X 시리즈와 PHASER 시리즈(리니어 단축)를 혼용하여 제어 가능
02로봇 설정
2대 로봇 설정:
2대 로봇 설정과 멀티 태스킹 프로그램으로 비동기의 독립된 움직임이 가능합니다. 부가 축 설정과 병용하여 더욱 자유로운 축 할당이 가능합니다.
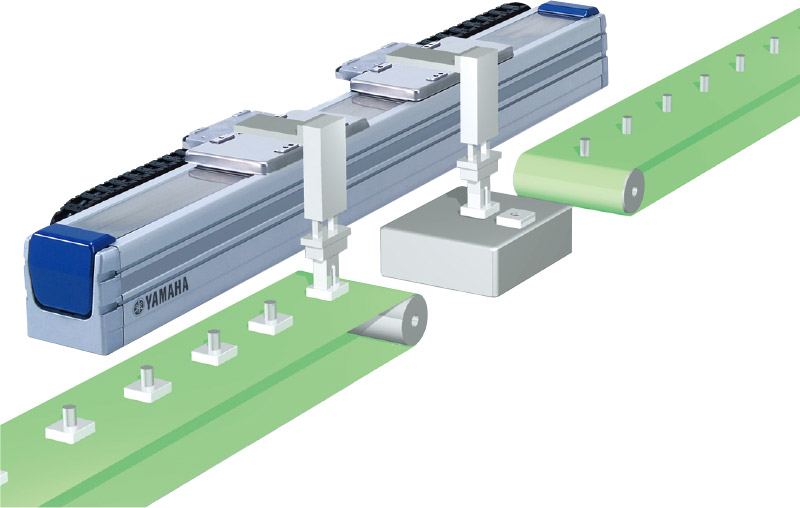
더블 캐리어:
리니어 모터 단축 PHASER 시리즈나 FLIP-X 시리즈의 N 타입(중공모터 회전형) 등과 같이 모터부가 자력으로 움직이는 타입의 로봇인 경우, 1개의 축에 2개의 모터를 부착할 수 있습니다.
메인 부가 축 설정:
MOVE 명령으로 동시에 움직이면 안되는 경우에는 부가 축 설정을 사용합니다. 메인 부가 축으로 설정된 축은 MOVE 명령으로는 동작하지 않고, DRIVE 명령(축 단위 이동 명령)으로만 움직입니다. 메인 로봇과 비동기식으로 움직이려는 축에 이 설정을 권장합니다.
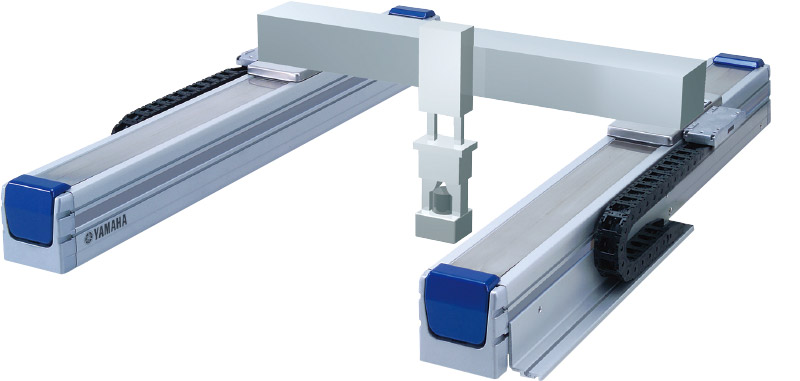
듀얼 설정:
듀얼 드라이브(2축 동기 제어)를 처리할 때 이 설정을 실시합니다. Y축 스트로크가 긴 갠트리 타입의 직교 로봇에서 높은 가감속일 때 정정을 원하는 경우나 고하중, 고추력을 원하는 경우에 듀얼 드라이브를 사용합니다.

YAMAHA MOTOR CO., LTD.
Robotics Business Unit
Sales & Marketing Section
FA Sales & Marketing Division
127 Toyooka, Chūō-ku, Hamamatsu, Shizuoka 433-8103, Japan
전화. +81-53-525-8350 /
팩스. +81-53-525-8378
[Head Office]
2500, Shingai, Iwata, Shizuoka, 438-8501, Japan