리니어 컨베이어 모듈 LCMR200
리니어 반송 시스템 리더가 제안하는 차세대 캐리어 반송 플랫폼
고성능을 통 한 캐리어 반송 환 경 개 선
01원점 복귀 생략
새롭게 개발된 고정밀 Full range absolute sensor에 의해 원점 복귀를 하지 않아도 됩니다. 동작의 Start/Stop가 간단하며 재기동 시에도 시간낭비를 줄일 수 있습니다.

02커넥션 플레이트와 커넥션 유닛을 통한 간편한 연결
모듈은 커넥션 플레이트로 기구적으로 위치 결정을 하며, 커넥션 유니트에 의해 모듈간 통신을 연결 합니다. 단시간에 재현성과 신뢰성이 높은 설치가 가능 합니다.
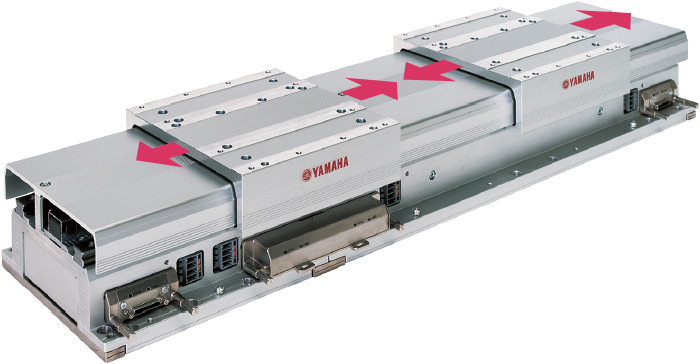
03왕복 경로의 모듈 인접 설치가 가능 하여 공간 절약 효과
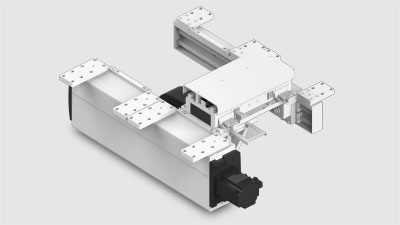
〈 케이블 인출 방향 선택 가능, 정면 배면 〉
모듈 케 이블 인 출 방 향이 선 택 가 능 합 니다. 장 치에 설 치시, 전 기 배 선 자 유도가 증 가합니다. 특 히 수 평 순 환 레이아웃에서는 왕복경로의 모듈에서 케이블 배출 방향을 역으로 설치 함으로써, 모듈을 최단 200mm까지 인접시킬 수 있고, 순환시의 사이클 타임 단축, 설치 공간 절약이 가능합니다.
04컴팩트한 구조
신형 리니어 모터를 사용하여 모듈의 높이가 LCM100보다 약 30 % 감소했습니다. 이로 인하여 공간을 유용하게 활용할 수 있습니다.
05본체에 내장된 일체형 모터 드라이버 적용으로 배선 최적화
모듈 본체에 모터 드라이버를 내장한 일체형 구조로 YHX 컨트롤러에서 YQLink 케이블만으로도 LCMR200 전체를 제어 할 수 있습니다. 제어판 내의 공간 최적화 및 효율성 향상에 기여합니다.
06각 슬라이더의 독립 동작 가능
속도 및 가속도를 동작별로 설정 가능하므로 모든 슬라이더를 임의의 타이밍으로 자유로이 조작 가능합니다
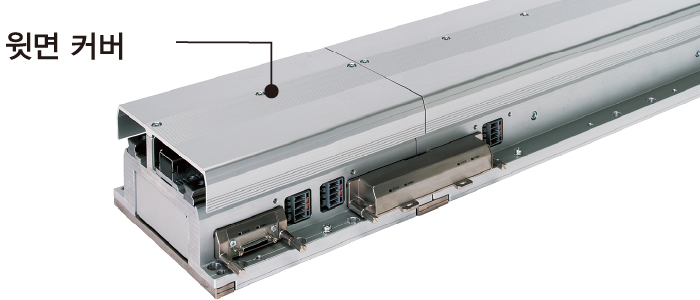
07상면 커버 적용
각 작업 공정에서 이물질 등에 의한 고장요인이 되지 않도록 가이드 레일 과 모터 및 센서를 보호하는 커버를 상면에 부착하였습니다.
08모든 슬라이더 간 기구 공차 ±30㎛ (Dowel pin기준)
임의의 한 포인트에 복수의 슬라이더가 차례로 정지할 경우 실제 정지 위치는 각 슬라이더의 정지 정밀도가 미세하게 다른 기구 간 공차(오차폭) 가 발생합니다. LCMR200 의 슬라이더 간 기구 공차를 ±30㎛로 제어 가능하며 정밀한 공정에 최적화되었습니다. RFID 등이 필요 없어 비용 절감이 가능합니다.




리니어 컨베이어 모듈 LCMR200

YAMAHA MOTOR CO., LTD.
Robotics Business Unit
Sales & Marketing Section
FA Sales & Marketing Division
127 Toyooka, Chūō-ku, Hamamatsu, Shizuoka 433-8103, Japan
전화. +81-53-525-8350 /
팩스. +81-53-525-8378
[Head Office]
2500, Shingai, Iwata, Shizuoka, 438-8501, Japan