水平多關節機器人 全方位機型
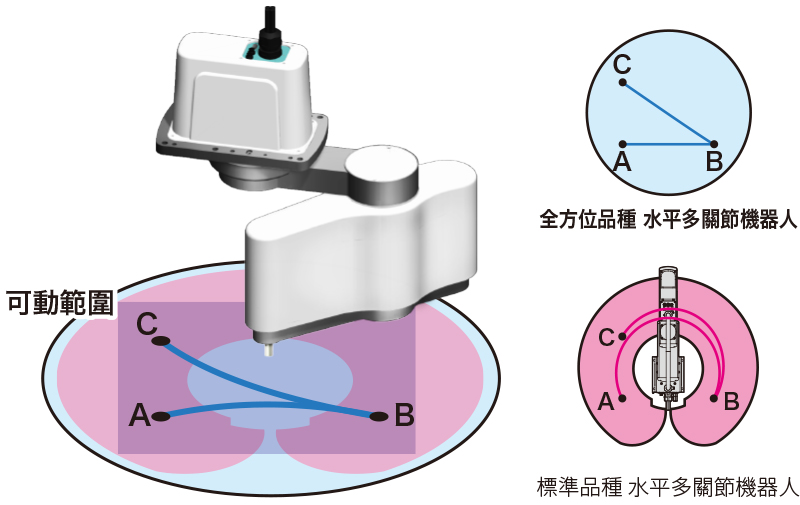
突破機械手臂的限制,解決並聯機器人的缺點!兼具了高度的定位精度及高速性。動作範圍的中央沒有死角空間,有助於設備的小型化。



特點
01可在機器人下方φ1000mm※所有範圍內動作
※以YK500TW為例
YK-TW在懸掛構造及機臂寬廣的旋轉角度之下, 可在機器人下方φ1000mm所有範圍內動作。 不限制托盤或輸送帶的安裝, 有助於設備的小型化。
02重複定位精度:XY軸 ±0.01mm ※
※以YK350TW為例
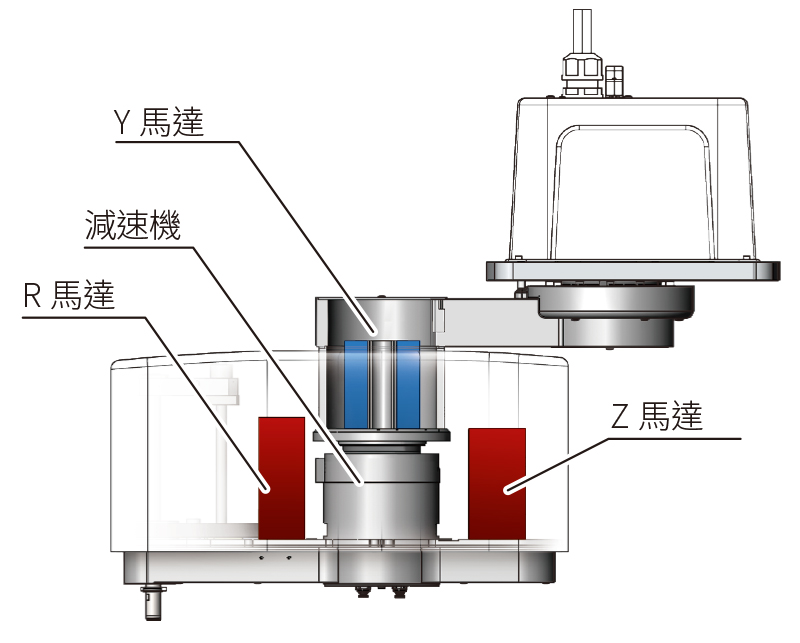
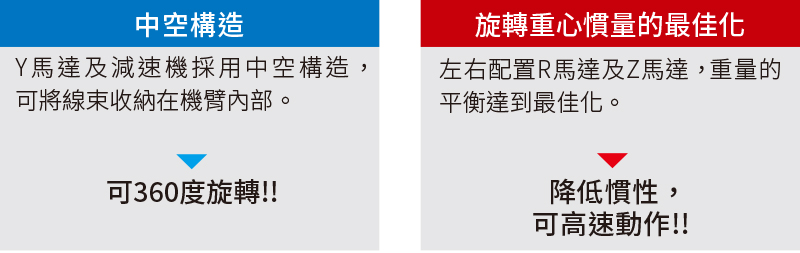
相較於並聯機器人, 具有相當高的重複定位精度。 徹底改善機器人的內部構造,達到重量平衡的最佳化。 此外, 更在輕量、 高剛性的機臂搭載最佳調諧的馬達,可實現高精度的定位。
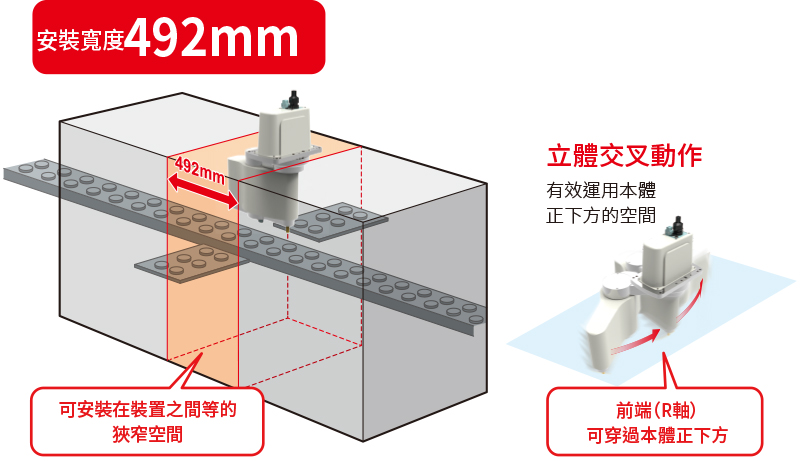
03最適合狹小空間
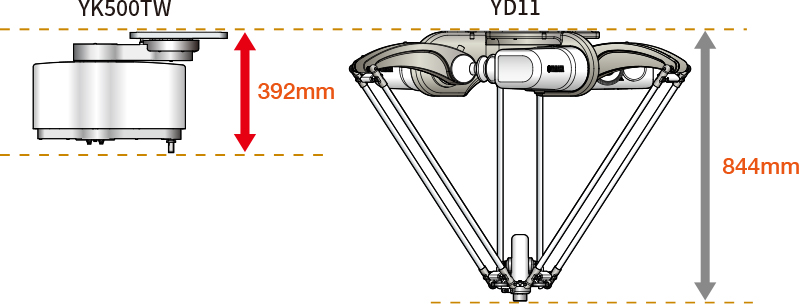
04總高度低於並聯機器人,節省空間
YK-TW的總高度為392mm。 除了可使設備更加精簡之外, 還增加了裝置配置上的自由度。
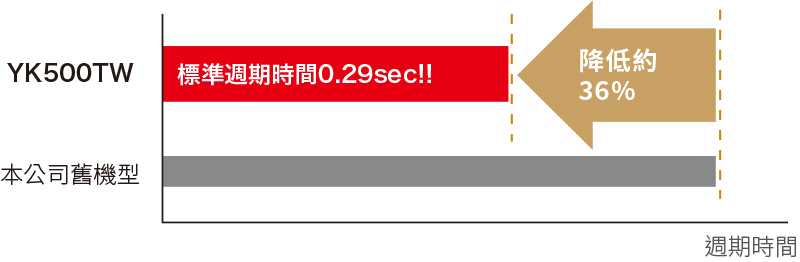
05標準週期時間 0.29sec *
* 以YK500TW為例
Y軸(第2機臂)穿過X軸(第1機臂)下方的水平多關節構造, 能夠以最佳路徑在點與點之間動作。此外, 透過內部重量平衡的最佳化, 使週期時間與本公司舊機型相比, 降低了36%。
與本公司舊機型相比, 負載1kg以水平300mm、上下25mm往復動作時的標準週期時間縮短約36%。
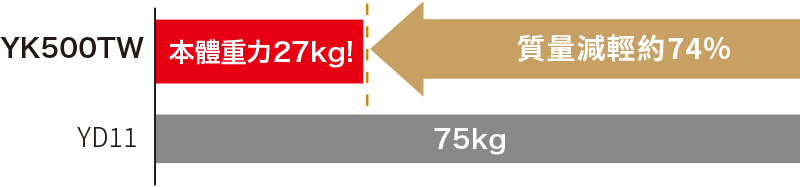
06總高度392mm/本體質量27kg * 慣性小、無須堅固的框架
* 以YK500TW為例
選配項目備有YK-TW專用的安裝框架。細節請洽詢本公司營業處。
水平多關節機器人 全方位機型

機器人事業部 營業統括部 FA 營業部
地址:433-8103 靜岡縣濱松市中央區豐岡町 127 番地
電話:+81 53-525-8350 (售前)/ +81 53-525-8160 (售後)
傳真:+81 53-525-8378