전동 그리퍼 YRG
야마하 로봇 언어를 통한 일괄 제어로 간단 조작 실현

야마하 로봇 언어를 통한 일괄 제어로 간단 조작 실현
파지력을 30~100%까지
1% 단위로 설정 가능
위치 검출 기능을 통해 워크의 계측 가능
속도 20~100%,가속도 1~100%까지
1%단위로 임의로 설정 가능
위치 결정 포인트는최대 10,000점 설정 가능
HOLD 출력 신호에 따라 센서 없이도워크를 잡지 못하거나 떨어트리는경우 등을 확인할 수 있습니다.



특징
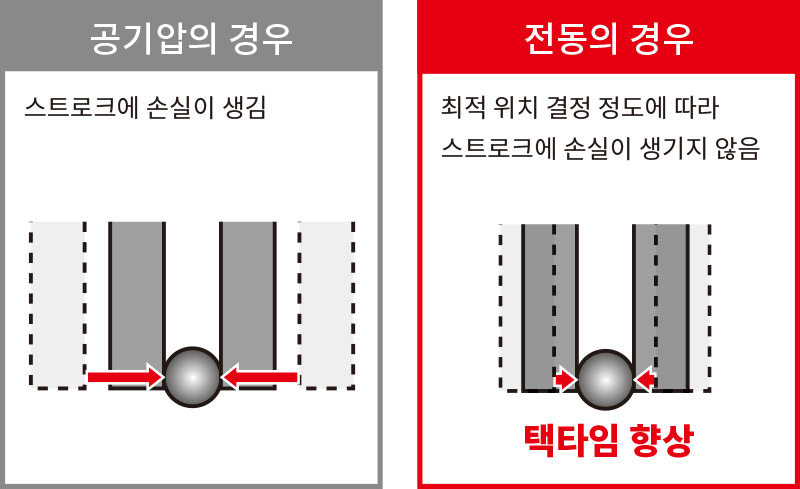
01전동 특유의 고정도 파지력, 위치, 속도 제어를 실현
기존의 공압 기기로는 하기 어려웠던 파지력 제어, 속도 및 가속도 제어, 다점 위치 제어나 워크의 계측 등이 가능하며, 다채로운 어플리케이션에 유연하게 대응합니다.
파지력 제어

파지력을 1% 단위로 설정 가능합니다. 유리나 스프링 등 쉽게 깨지거나 변형되는 워크를 파지할 수 있습니다. 핑거 위치가 바뀌어도 파지력은 일정합니다.
다점 위치 제어
워크 사이즈에 맞추어 핑거 위치를 임의로 설정할 수 있습니다. 워크 사이즈 및 재질이 혼재된 라인이나 순서 변경이 많은 라인의 효율UP에 공헌 합니다.
워크의 유무 확인 기능
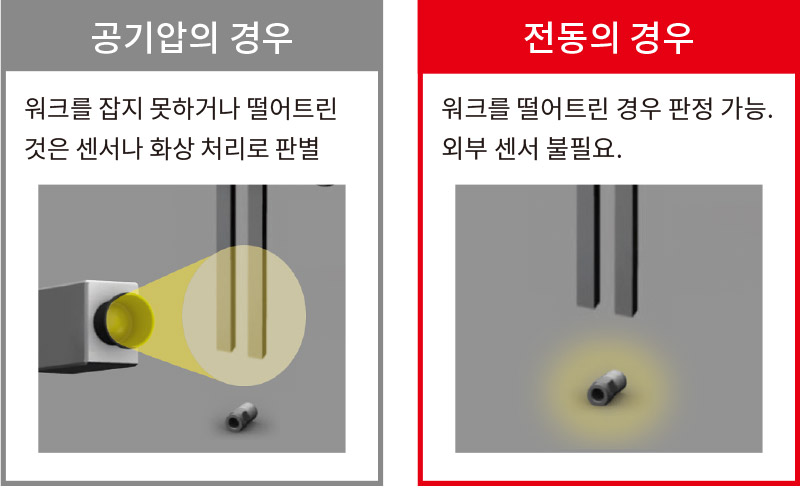
전동 그립퍼가 HOLD 신호를 출력합니다. 워크를 잡지 못하거나, 운반 중인 워크를 떨어트린 것을 확인할 수 있습니다. 외부 센서가 불필요합니다.
021대의 컨트롤러로 제어 가능
그립퍼의 제어는 컨트롤러 1대로 가능합니다. PLC 등 상위 장치와의 통신이 필요 없기 때문에 셋업이나 기동이 압도적으로 용이합니다.
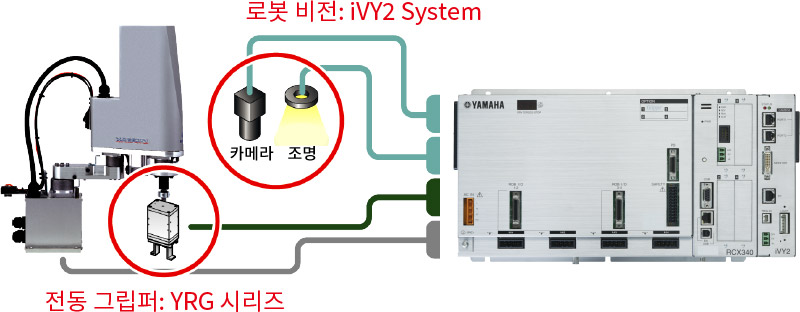
03비전 시스템과의 조합으로 다양한 용도에 대응
컨트롤러 일체형 로봇 비전 ʻiVY2 System’과 조합하여 카메라를 통한 위치 결정부터 워크의 핸들링까지 RCX340 컨트롤러로 일괄 제어할 수 있습니다. 고기능 시스템을 간단하게 구축할 수 있습니다. ※RCX340 컨트롤러로도 사용 가능
전동 그리퍼 YRG

YAMAHA MOTOR CO., LTD.
Robotics Business Unit
Sales & Marketing Section
FA Sales & Marketing Division
127 Toyooka, Chūō-ku, Hamamatsu, Shizuoka 433-8103, Japan
전화. +81-53-525-8350 /
팩스. +81-53-525-8378
[Head Office]
2500, Shingai, Iwata, Shizuoka, 438-8501, Japan