LMW — From Seed to Blossom
Introducing the stories behind Yamaha Motor's technologies.

In 2014, Yamaha released the Tricity, a city commuter LMW* model with two front wheels. It went on sale in Thailand, Japan, Europe and other markets around the world. A model popular with riders of all ages, the roots of the Tricity can be traced back to a design office located in Omotesando, Tokyo in the 1970s. Some forty years later, we take a look at the waza and sube forged by these Yamaha engineers.
*Leaning Multi Wheel (LMW): a registered Yamaha Motor trademark (Japan Patent Office Trademark #5646157) for vehicles with three or more wheels that can lean through corners like a motorcycle.
Beginnings — Approaching the Leaning Multi-Wheel Format
If you head east down the street leading from the entrance to Meiji Shrine in Harajuku towards Omotesando, and cross Meiji Dori, on the left-hand side there used to be a large apartment building. Called the Central Apartment, it was originally built in the 1950s for members of the Allied Occupational Forces. During the 1960s, shops and offices run by fashion designers, artists and illustrators were located in that apartment building, and it was considered one of the centers of fashion and design in Japan. A team of Yamaha designers also had a nondescript office there.
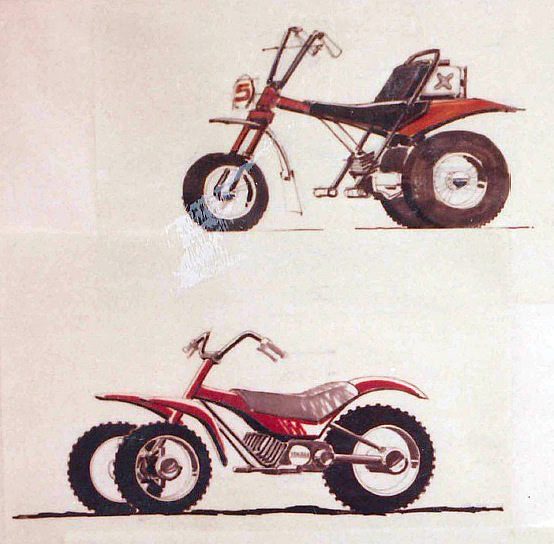
In 1977, Yamaha released the Passol 50cc (Class I) scooter (#1). Featuring a step-through design so the rider didn’t have to sit astride the machine, the scooter was very popular with women. After studying how Passol riders used their machines, the designers felt the future possibilities for another kind of personal vehicle they had been conducting R&D on. It all began with design sketches of all different kinds of commuter vehicles with two front wheels tacked to the wall of that apartment office — one of which was a Passol with two front wheels.

It also did not end as just a sketch. The advanced development team did research into as well as create a prototype with two front wheels and one with two rear wheels using the Passol (technically, the Passol was also under development before release) as the base. Repeated road tests were conducted as well (#2). The team felt there was a bright future for this technology while analyzing data and performing road tests to study the interrelated movement of the suspension and steering system for the two front wheels when leaned over.


Yamaha filed patent applications for the technical knowhow they gained in its R&D in 1976 (#3). The time to apply these technologies to products and prepare for their manufacture was fast approaching. However, domestic demand in Japan for 50cc (Class I) scooters was booming at the time and the decision was made to devote corporate resources to that market instead. Commercialization of a twin-front wheel model was postponed, and the designers returned to Yamaha headquarters in Shizuoka from the office in Omotesando. However, the passion to create a multi-wheeled vehicle that could lean through corners like a motorcycle did not fade away.
The 4-Wheeled Motorcycle — Establishing a Foundation and Developing LMW Technology
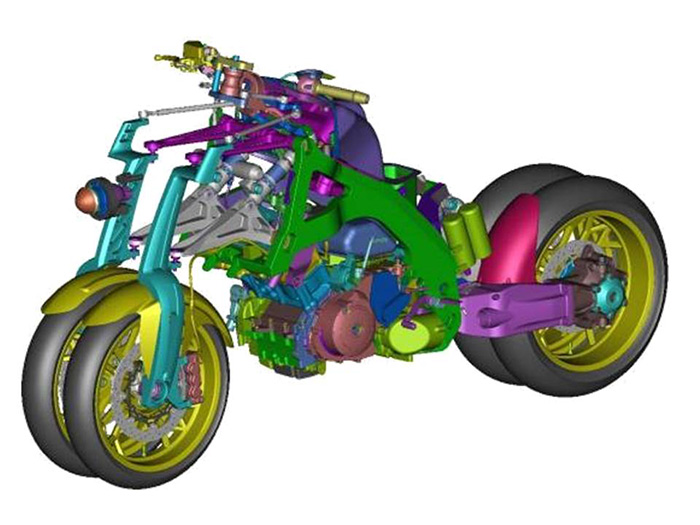
At the Tokyo Motor Show in 2007, Yamaha unveiled a 4-wheeled motorcycle concept model called the “Tesseract.” (#4) Powered by a hybrid drivetrain using an engine and an electric motor, the Tesseract featured a unique suspension mechanism that allowed the machine to lean while cornering. Having roughly the same width as an ordinary motorcycle and boasting high maneuverability, the Tesseract was an exciting example of what personal vehicles could become in the future, and was a defining exhibit of the show.


At the time, Yamaha was developing and applying a host of new technologies for motorcycles, from fuel delivery systems to aluminum casting methods. This included developing LMW vehicles as a next-generation technology. The Tesseract was an interim example of those R&D efforts; it served as evidence of Yamaha engineers’ analysis and verification of the possibilities of an LMW vehicle, from how to power it, to the number of wheels and where to position them, front/rear weight distribution and much more. The website survey for the Yamaha booth at the show confirmed that the Tesseract generated an extremely positive response from visitors.
The possible uses and model categories for LMW vehicles can range from urban commuting and sport riding to cruising and business applications. But the first task the engineers at the time decided to focus on was developing a sport LMW, which would require a high-level balance of technical performance. The result was the Tesseract which debuted at the Tokyo Motor Show in 2007, but even after the show, research and development of the platform continued. The engineers continuously refined the technology and performance with further prototypes built to help determine and confirm things like a layout and track (distance between the left and right wheels) to take advantage of the LMW format, a ridable machine size and chassis dimensions for smooth cornering (#5). Though there were many hurdles to clear, in doing so, the engineers were able to confirm the many unique characteristics of the LMW configuration at the same time: a good feeling of stability at very low speeds, a solid feel when riding in crosswinds and usability when going over uneven road surfaces. Furthermore, by starting from zero to develop what was in essence a 4-wheeled motorcycle, there were also many things that were learned and fed back into developing 2-wheeled motorcycles.



One of the key phrases the engineers arrived at in the development of this sport LMW was: “a light, easy-to-ride LMW.” But once again, history froze further development of the LMW concept. The 2008 global financial crisis and the subsequent destabilization of the markets meant the R&D towards creating a production LMW came to a halt. But by now, everyone in the project was convinced of the LMW’s performance and potential, like how the level of feedback from the road and the feeling of stability when cornering made for an enjoyable ride, the good ride quality when absorbing bumps or when going over uneven road surfaces, and how easy it was to feel and control the brakes.
The Birth of the Tricity, an LMW with Two Front Wheels
Development of the Tricity began a few years after the 2008 global financial crisis. Interestingly, the original concept did not call for two front wheels. However, the chronic traffic congestion in Europe’s major cities was considered a significant social issue at the time. Thus, Yamaha believed it was time to propose a new kind of vehicle for personal mobility that was much smaller than an automobile yet unlike existing scooters or motorcycles. The project team tasked with creating this next generation of personal mobility was primarily made up of bright young designers and engineers taken from various departments within the company, and they began coming up with ideas to explore, verify and propose.
Many plans emerged but most were discarded. The one that remained had two front wheels. Behind this decision was the fact that there was already extensive track testing data from the advanced development of prototype LMWs with two front wheels. Since this data had been gained several years before the plan got the go-ahead, this gave the design more validity. A new department for development was set up in the company and the project’s leader would be an engineer who had been involved in developing Yamaha’s Paris-Dakar and MotoGP machines. They reviewed all the proposals and data accumulated over the years of prototype track testing, from the original two-front-wheeled Passol to the 4-wheeled LMW prototypes. Furthermore, the design of the machine’s braking system, the location of its center of gravity (CG) in the middle of the chassis, the 50:50 front/rear weight distribution and more were reflections of Yamaha’s extensive knowledge learned from racing motorcycles at the highest level.
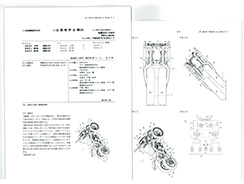
This was a totally new challenge. Since the team had much established technology to draw from, the engineers were said to be somewhat conservative in their approach, but a whole new system was developed to give the machine natural handling qualities — the Yamaha-exclusive “LMW mechanism.” It consists of a front steering and suspension system using a parallelogram link and cantilevered telescopic suspension set up to work in total harmony.
The parallelogram link uses parallel quadrilateral arms that move to lean the two front wheels and it is the key for the two front wheels to lean in concert with the chassis when cornering. Because the wheel track (distance between the left and right wheels) changes very little when riding, the rider enjoys lightweight handling and a feeling of stability. In developing the suspension, the engineers chose to use a cantilevered telescopic suspension with consideration for the amount of suspension travel (compression and rebound), the fit and feel for the rider, bank angle, turning radius and more. It is the fine balance between these two systems that resulted in Yamaha’s unique LMW mechanism. The Tricity offers a new kind of riding enjoyment thanks to its light, sporty handling and good feeling of stability. Comparable in size to existing scooters, the Tricity also has the utility needed for urban use. After some 40 years of R&D, the LMW technology that has finally begun to “bloom” thanks to the Tricity is not only attracting increasing interest in new applications for the urban environment, but also demonstrating its potential for sport riding, touring and simply riding for the fun of it.