


什么是摩托车?
Yang membuat 项目 MOTOBOT unik adalah pendekatannya terhadap pengoperasian sepeda motor secara otomatis sepenuhnya。 Berbeda dengan mede saat ini yang digunakan untuk 系统 pengemudi otomatis pada mobil,yang sudah dikembangkan dalam beberapa tahun terakhir,dimana tujuannya adalah agar 机器人人形机器人dapat mengoperasikan kendaraan tanpaukken secdarai
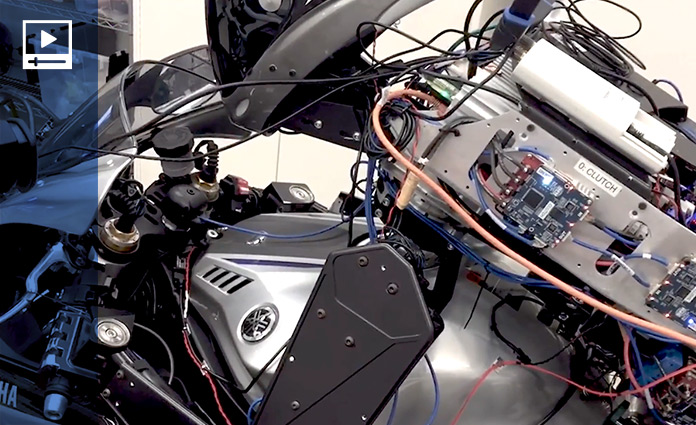
Berdasarkan 数据 kecepatan sepeda motor, rpm mesin, karakter mesin,dll., MOTOBOT akan mengontrol 6 buah aktuatornya (*) untuk dapat mengendarai sepeda motor secara otomatis..Ke depannya, teknologi untuk 传感器位置识别(GPS 传感器位置识别) , dll.) dan 机器学习 akan dimanfaatkan untuk membuat MOTOBOT mampu menentukan best line untuk melintasi track balap dan batas performa sepeda motornya sehingga dapat meningkatkan 圈速 secara berturut-turut。达日项目INI,北寒mampu memvisualisasikan卡拉pengoperasian sepeda马达seseorang,menyimpulkan hubungan安塔拉骑手输入担karakter mesin,担kemudian menggunakan hasil pengetahuan tersebut寻找及体验pengembangan kendaraan untuk menciptakan“感动”阳Hotel详细信息大臣LAGI。 Dan juga, dengan mengubah program kontrol dan pentuk mekanisme pengoperasian MOTOBOT seperlunya, kami harap MOTOBOT juga akan mampu beradaptasi untuk mengendarai kendaraan lain seperti watercraft dan snowmobile。
* Untuk mengoperasikan kemudi, handle gas, rem depan, rem belakang, tuas kopling, danpedal pemindah gigi
Teknologi 摩托车
Di masa yang akan datang, kemungkinan MOTOBOT akan tercipta。
Dengan menggunakan teknologi MOTOBOT untuk mengoptimalkan kontrol kendaraan yang dinamis, kami akan mengembangkan performa yang lebih tinggi danbentu mobilitas yang lebih aman。

MOTOBOT menyatukan teknologi雅马哈发动机yang didapat dari pengembangan sepeda motor (pengetahuan tenmika kendaraan,electronic control, dll.) dengan teknologi yang dikumpulkan dari pengembangan industri robots kami (robot control, dll.)。

Berbagai jenis aktuator yang melakukan pengendalian saat 骑 dikontrol secara tepat dan dapat mengendalikan sepeda motor sama seperti pengendara sepeda motor(马努西亚)。

Dengan memperbaiki algoritma untuk mengoperasikan mekanisme yang dibutuhkan saat 骑 dengan kecepatan tinggi dan perangkat tambahan lainnya, yang pada akhirnya akan mengarah pada peluang terciptanya teknik 骑 tinglainnya ting。
目标

Tujuan : Riding di track lurus hingga kecepatan tertinggi 100km/jam, melaju dengan teknik slalom, dan menikung。

Tujuan : Menyimpulkan syarat yang dibutuhkan agar mampu 骑 melebihi kemampuan manusia; yaitu dapat melaju di track balap dengan kecepatan 200 公里/jam atau lebih。


Tujuan : Menggunakan teknologi dasar yang diperoleh melalui pengembangan MOTOBOT,seperti 机器人控制和人机界面创建,sebagai titik awal R&D untuk terus-menerus menciptakan nilai baru。
伊诺瓦西·特布卡
MOTOBOT adalah 项目 inovasi danriset terbuka yang bekerjasama dengan lembagariset terdepan dunia SRI International, yang bertujuan untuk menjelaskan tujuan tinggi dan unik yang dipresentasikan oleh 项目 ini.

