


什么是摩托车?
MOTOBOT 项目的独特之处在于其完全自动化操作的方法。与近年来取得进展的当前用于汽车自动驾驶系统的方法不同,其目标是让仿人机器人操作未经修改的车辆以供自主使用。根据车速、发动机转速、机器姿态等数据,MOTOBOT 将控制其六个执行器*以自主操作车辆。展望未来,将利用机器位置识别技术(高精度 GPS、各种传感器等)和机器学习,使 MOTOBOT 能够自行决定绕赛道的最佳路线和摩托车性能的极限,以便它可以在赛道的连续圈数中提高单圈时间。从这个项目中,我们将能够可视化有关人类摩托车操作的数据,推断骑手输入和机器行为之间的关系,然后使用由此产生的专有技术开发车辆以创造更大的Kando。此外,通过根据需要改变 MOTOBOT 的控制程序及其操作机构的形状,我们预计它也将适用于乘坐其他车辆,如个人船只和雪地摩托。
* 用于操作转向、油门、前制动、后制动、离合器和换档踏板
摩托车技术
MOTOBOT 将创造的未来可能性
通过使用 MOTOBOT 技术优化车辆动力学控制,
我们将开发性能更高、更安全的出行方式。

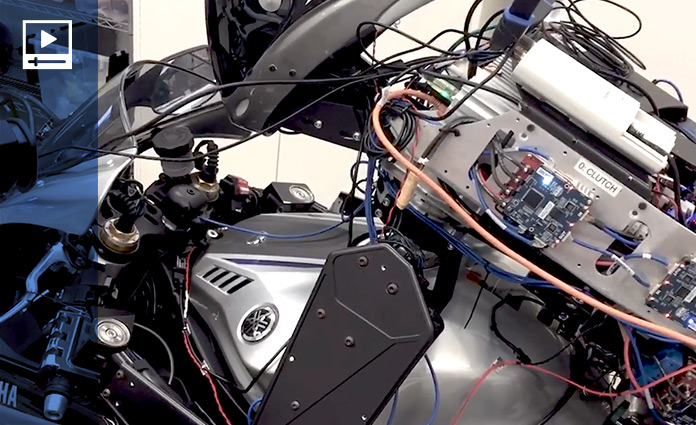
MOTOBOT 融合了雅马哈发动机在摩托车开发中获得的技术(车辆动力学知识、电子控制等)与我们的工业机器人(机器人控制等)开发中获得的技术。

执行骑行操作的各种执行器受到精确控制,可以执行类似于人类骑手的动作。

改进用于操作高速轨道骑行所需机制的算法和其他增强功能,最终将使其他类型的高级骑行技术成为可能。
路线图

目标:直线骑行最高时速100公里;运行激流回旋课程;过弯


目的:演绎超越人类能力的骑行要求;以 200 公里/小时或更高的速度在赛道上一圈


目标:利用通过开发MOTOBOT获得的底层技术,例如机器人控制和人机界面创建,作为继续研发创造新价值的基础。
开放式创新
MOTOBOT 是一个开放式创新项目,正在与世界领先的研究机构 SRI International 合作开发,以明确该项目提出的独特而崇高的目标。

