대형 스카라 로봇 YK1200XG 전용 컨트롤러 RCX341 사양
대형 스카라 로봇 YK1200XG 전용 컨트롤러 RCX341 사양을 소개합니다.
기본 사양
| 기본 사양 | ||||
|---|---|---|---|---|
| 적용 로봇 | 대형 스카라 로봇 YK1200XG | |||
| 접속 모터 용량 | 4 축 합계 1600W 이하 | |||
| 전원 용량 | 2500VA | |||
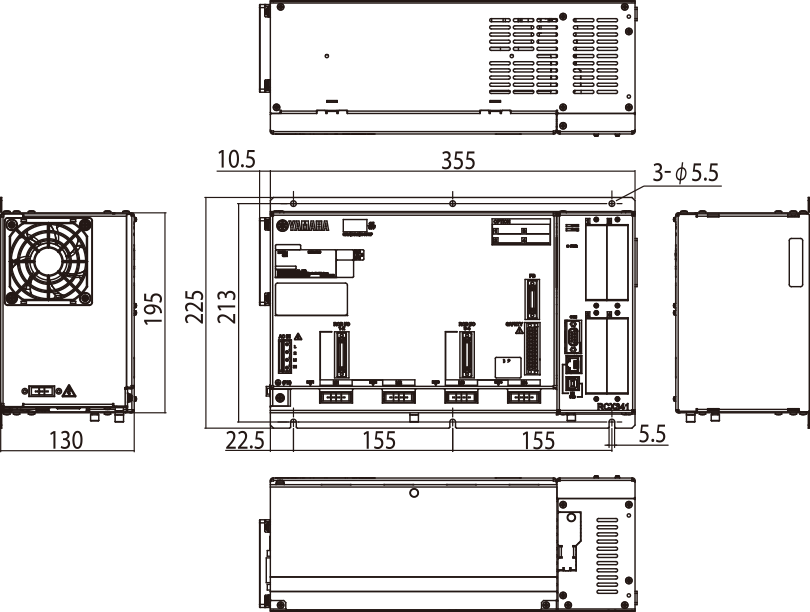
| 외형 치수 | W355 × H195 × D130mm(본체만) | |||
| 본체 중량 | 5.8kg | |||
| 입력 전원 | 제어 전원 | 단상 AC200V 〜 230V + 10% 이내 , 50/60Hz | ||
| 주전원 | 단상 AC200V 〜 230V ± 10% 이내 , 50/60Hz | |||
| 축 제어 | ||||
| 제어 축 수 | 최대 4 축 ( 동시 제어 : 6 축 ) 컨트롤러 간 통신 YC-Link / E 는 최대 16 축 (4 로봇 ) 까지 확장 가능 |
|||
| 구동 방식 | AC 풀 디지털 SERVO | |||
| 위치 검출 방식 | 리졸버 , 자기식 리니어 스케일 | |||
| 제어 방식 | PTP 동작 (Point to Point), 아치 모션 , 직선 보간 , 원호 보간 | |||
| 좌표계 | 관절 좌표 , 직교 좌표 | |||
| 위치 표시 단위 | 펄스 , 밀리미터 (1/1000 단위 ), 도 (1/1000 단위 ) | |||
| 속도 설정 | 0.01~100%(1% 미만은 프로그램으로 변경 가능 ) | |||
| 가감속도 설정 | 로봇형식 및 선단질량 파라미터에 의한 최적화 가속도 및 감속율 파라미터에 의한 설정 (1% 단위 설정 ) ※프로그램으로 변경 가능 존 제어 ( 스카라형 로봇만 , 암 자세에 따른 최적화 ) |
|||
| 프로그래밍 | ||||
| 프로그램 언어 | 야먀하 BASIC II(JIS B8439(SLIM 언어 ) 준거 ) | |||
| 멀티태스크 | 최대 16 태스크 | |||
| 시퀀스 프로그램 | 1 프로그램 | |||
| 메모리 용량 | 2.1MB(프로그램과 포인트의 합계 용량) ( 최대 포인트 수 사용 시의 프로그램 사용 가능 용량은 300KB) |
|||
| 프로그램 | 100 프로그램 ( 최대 프로그램 수 ) 9999 행 (1 프로그램 최대 행 수 ) |
|||
| 포인트 | 30000 포인트 ( 최대 포인트 수 ) | |||
| 포인트 교시 방식 | MDI( 좌표값 입력 ), 다이렉트 티칭 , 티칭 프리백 , 오프라인 티칭 ( 외부에서 데이터 입력 ) | |||
| 시스템 백업 ( 내부 메모리 백업 ) |
리튬 전지 (0~40℃에서 약 4 년간 유효 ) | |||
| 외부 입출력 | ||||
| SAFETY | 입력 | 비상정지 입력 2 계통 자동모드 입력 2 계통 (CE 사양만 유효) |
||
| 출력 | 비상정지 접점출력 2 계통 ENABLE 접점 출력 2 계통 (PBX-E 사용시에만 유효 ) 모터 파워 레디 출력 2 계통 |
|||
| 브레이크 출력 | 트랜지스터 출력 (PNP 오픈 컬렉터 ) | |||
| 원점 센서 입력 | DC24V B 접점 센서 연결 | |||
| 외부 통신 | RS-232C : 1CH(D-SUB 9 핀 ( 암 )) Ethernet : 1CH(IEEE802.3u/IEEE802.3 준거) 100Mbps/10Mbps(100BASE-TX/10BASE-T) Auto Negotiation 대응 USB : 1CH (B 타입) RS-422 : 1CH(PBX 전용) |
|||
| 일반 사양 | ||||
| 사용 온도 | 0°C~40°C | |||
| 보존 온도 | -10°C~65°C | |||
| 사용 습도 | 35%~85%RH(결로가 없을 것) | |||
| 노이즈 내량 | IEC61000-4-4 레벨3 | |||
| 보호 구조 | IP20 | |||
| 보호 클래스 | 클래스Ⅰ | |||
| 옵 션 | ||||
| 옵션보드※ | 페럴렐 I/O 보드 | 표준 사양 | 전용 입력 8 점 , 전용 출력 9 점 범용 입력 16 점 , 범용 출력 8 점 ( 최대 1 보드 , NPN/PNP 사양 선택 ) |
|
| 확장 사양 | 범용 입력 24 점 , 범용 출력 16 점 ( 최대 4 보드 , NPN/PNP 사양 선택 ) |
|||
| CC-Link 보드 Ver1.1/2.0 | 리모트 I/O 전용 입출력:각 16 점 범용 입출력:각 96 점 리모트 레지스터 입출력:각 16 워드 |
|||
| DeviceNet 보드 | ||||
| Ethernet I/P 보드 | ||||
| PROFIBUS 보드 | ||||
| PROFINET 보드 | ||||
| EtherCAT 보드 | ||||
| YC-Link/E 보드(마스터 / 슬레이브) | 통신주기 :1ms, 제어 주기 : 최소 1ms / 최대 8ms, 최대 로봇 대수 :4 대 최대 제어 축수:전 16 축 ( 마스터 컨트롤러 4 축 포함 ) 슬레이브만으로 최대 12 축 |
|||
| YRG(그립퍼)보드 | 위치 검출 방식 : 광학식 로터리 엔코더 , 최소 설정 거리 : 0.01mm 속도 설정 : 파라미터 최고속도에 대해 20~100% 로 설정 , 그립퍼 연결 대수 : 최대 4 대 구동 전원:DC 24V ± 10% 1.0A Max |
|||
| 트래킹 보드 | 엔코더 연결 대수 : 최대 2 대 , 대상 엔코더 : 26LS31/26C31 상당 라인 드라이버 (RS422 준거 ) 엔코더 준거 : DC5V(2 카운터 (ch) 합계 500mA 미만 ) ( 컨트롤러에서 공급 ) |
|||
| iVY2 유닛 | 카메라 화소수 : 최대 200 만 화소 , 품종 설정 수 : 254 품종 , 카메라 연결 대수 : 최대 2 대 전원:DC24V ± 10% 1.5A Max |
|||
| 프로그래밍 박스 | PBX、PBX-E | |||
| 앱솔루트 배터리 | 3.6V 2700mAH / 축 백업 유지 기간 : 약 1 년 | |||
| PC 용 소프트웨어 | RCX-Studio 2020 | |||
| 회생 유닛 | ||||
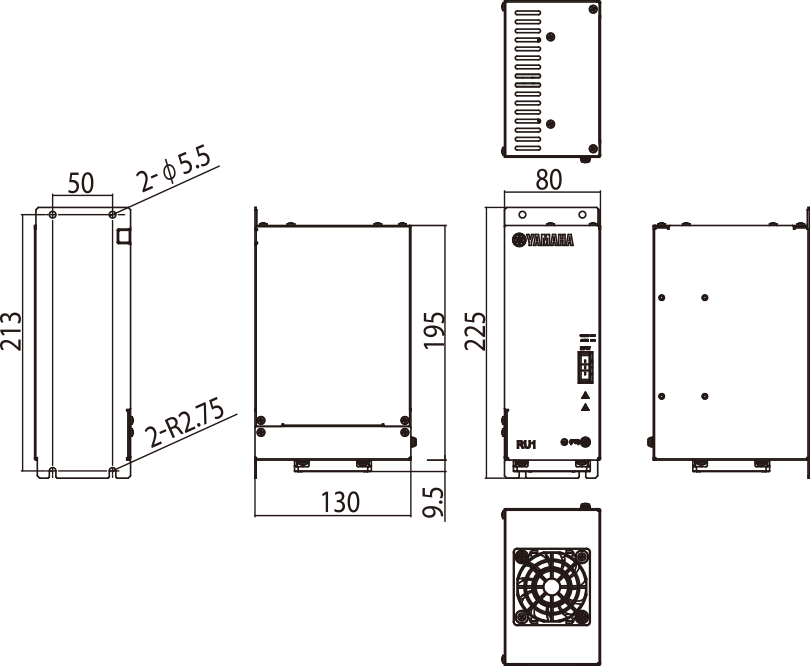
| 명칭 | 「RU1」 | |||
| 전원 | DC254 〜 357V ( 컨트롤러 DCBUS 접속 ) | |||
| 사이즈 | W80 x H195 x D130mm(본체만) | |||
| 중량 | 2,500g ( 본체만 ) | |||
- ※
- 옵션 보드의 부착 가능 슬롯 수는 4 개 슬롯입니다 .
외관도
RCX341
회생 유니트 RU1

YAMAHA MOTOR CO., LTD.
Robotics Business Unit
Sales & Marketing Section
FA Sales & Marketing Division
127 Toyooka, Chūō-ku, Hamamatsu, Shizuoka 433-8103, Japan
전화. +81-53-525-8350 /
팩스. +81-53-525-8378
[Head Office]
2500, Shingai, Iwata, Shizuoka, 438-8501, Japan