Newtonian Mechanics in Our Waza and Sube
介绍雅马哈发动机技术背后的故事。
雅马哈发动机技术可以大致分为三个领域:动力系统、底盘和船体以及电子控制。 Seeds of Creation 网站介绍了 Yamaha 技术背后的技术 ( waza) 和技能 (sube) 的各种示例,但它们的起源可以追溯到生活在 17 和 18 世纪的英格兰数学家、物理学家和天文学家艾萨克·牛顿 (Isaac Newton)。
据说,在看到一个苹果从他花园里的树上掉下来后,他开始思考我们现在知道的重力的存在。即使在他去世大约 300 年后的今天,牛顿力学仍是解释各种现象的基础,从我们周围的普通物品到医学和太空探索。
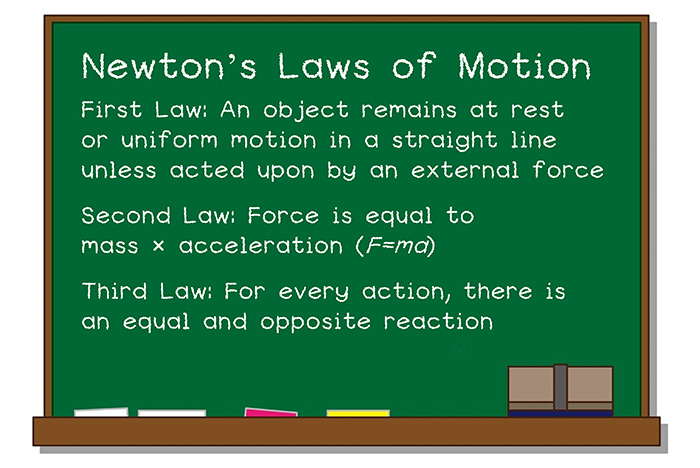
牛顿力学基于他的三个运动定律,如黑板(#1) 所示。
第一定律指出,除非受到外力作用,否则物体将保持静止或匀速直线运动。那时物体将保持在那个运动状态,除非有力改变运动。
第二定律指出力F等于质量m × 加速度 a (F=ma)。换句话说,物体的加速度取决于作用在物体上的合力和物体的质量。
第三定律指出,对于每一个动作,都有一个相等和相反的反应。
我们来看看这些规律与雅马哈产品技术的关系。
Newton’s Second Law (F=ma) as Seen in a Piston
Yamaha has developed scores of engines since it was founded, and while each has its own characteristics, they are all based on Newton’s First and Second laws.
让我们看看第二定律如何与现代发动机的运行相关联。骑摩托车匀速行驶时,发动机也匀速转动,但活塞实际上并不是以相同的速度上下运动。当活塞在气缸内往复运动时,它的速度在其行程的最顶部(上止点)和底部(下止点)和更快的中间行程(#2)处为零。也就是说,它的速度会发生变化,这种变化称为加速度。此外,在活塞速度达到零的瞬间加速度最大。
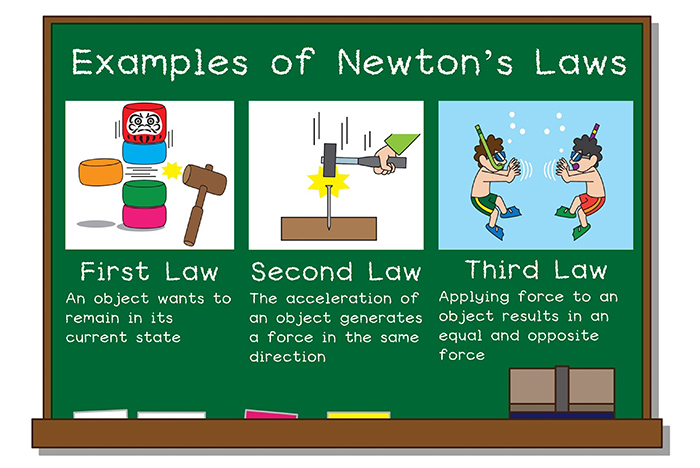
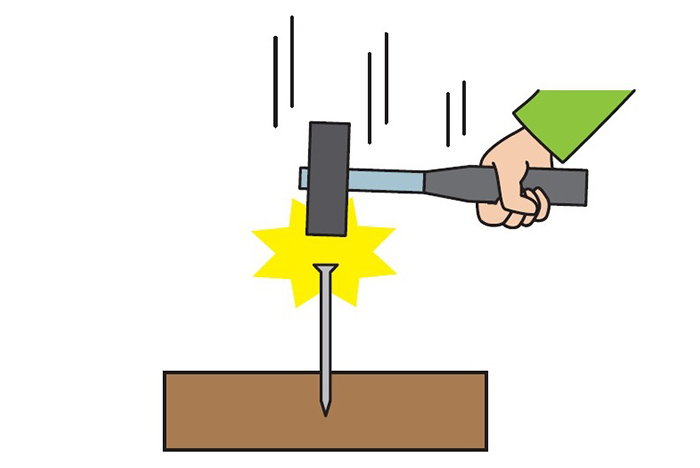
想象一把锤子敲钉子。锤子击中钉子的瞬间,锤子的速度为零。因为此时它的加速度最大,所以产生的力最大,锤头的有效重量成倍增加(#3)。
回到活塞,让我们用牛顿第二定律中的 F=ma 方程来分解它。F是活塞产生的力(惯性力),m是活塞的质量,a是加速度。因此,m × a = 活塞产生的力。因此,如果活塞的质量减半,活塞产生的力也会减半。
人们常说,使活塞更轻可减少其往复运动的重量,但这反过来也减少了它产生的力。然而,更轻的活塞提供了许多好处,例如减少连杆和其他发动机部件上的负载、实现更高的转速、减少振动和机械噪音以及提高可靠性。
牛顿第二定律促使雅马哈工程师设计出更轻的活塞。这就是重量轻的锻造铝锻造活塞*广泛用于高转速摩托车发动机的原因。
*锻造活塞:活塞是发动机的心脏,由铝制成。有两种方法可以将铝成型为活塞。一种是铸造,其中将铝熔化并倒入模具中,然后冷却凝固成所需的形状。另一种方法是锻造,其中铝被加热并压入模具以形成形状。通过锻造,铝在成型时不会熔化,因此保持了铝晶体结构的密度,从而制成薄而轻的活塞。
有关我们的铸造和锻造操作的更多信息:
OEM铸锻件

Newton’s First Law in Engines
Yamaha engines reflect Newton’s First and Second laws in other ways also, like the offset cylinders employed in our outboard motors and the YZF-R1 motorcycle to our “BLUE CORE” technology for small-displacement engines and the crossplane crankshaft featured in models like the YZF-R1 and MT-10. Let’s take a closer look at the crossplane crankshaft (#4).
众所周知,燃烧引起的活塞运动通过连杆在曲轴处转化为旋转力。然而,这种曲轴旋转不仅仅由燃烧力产生。曲轴在旋转时还会产生变化的力,与燃烧条件无关。也就是说,活塞的惯性力也对曲轴的旋转起作用。这称为“惯性扭矩”。
在每次旋转期间,曲轴会加速和减速,这意味着惯性扭矩量会发生变化。通过消除这些波动,交叉平面曲轴提供线性功率特性。
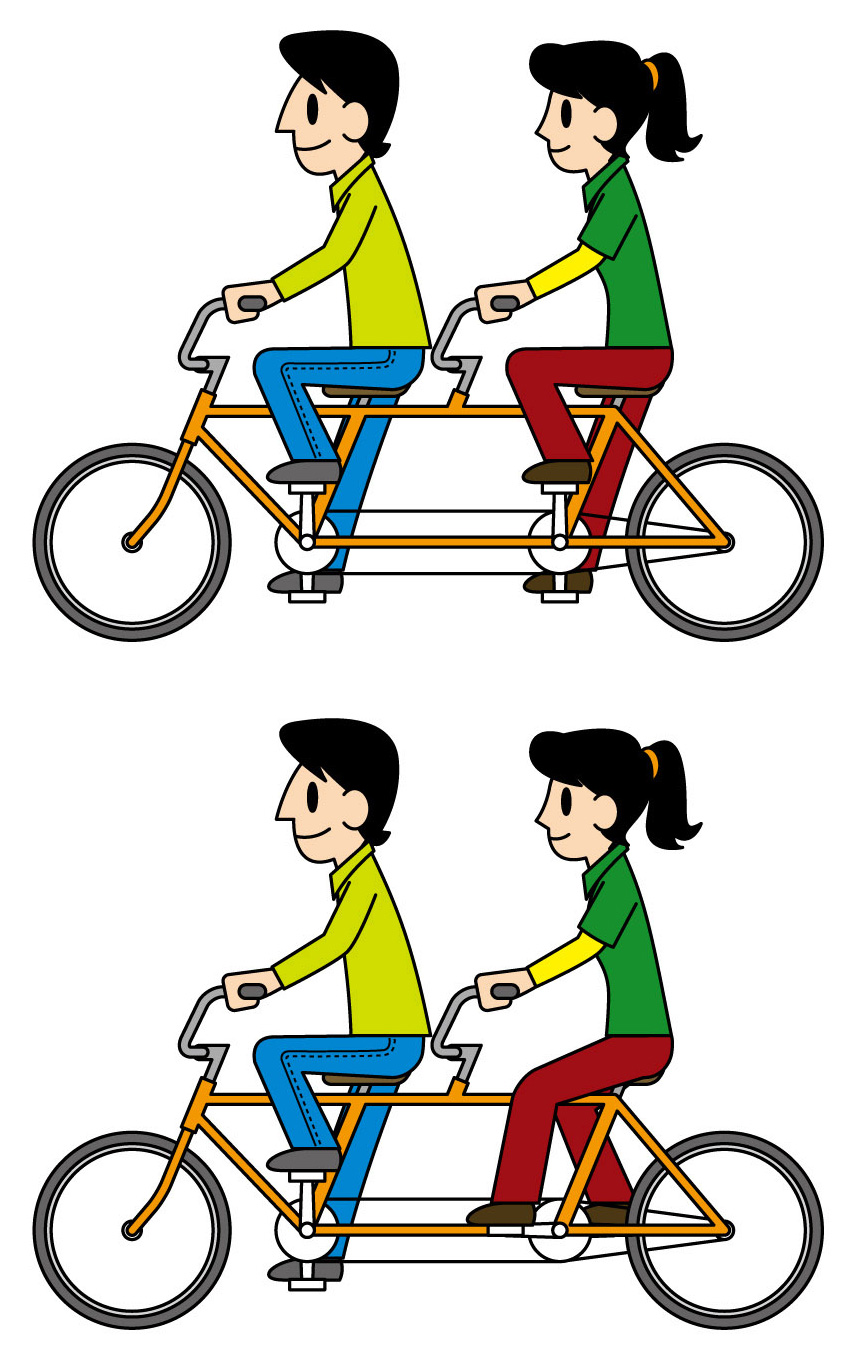
看看两个人骑双人自行车的照片(#5)。在上图中,两个骑手的踏板始终处于相同的位置,而在下图中,前后骑手的踏板位于不同的位置。在第一张图片中,骑手可能需要一些时间才能让自行车完全停止。但是在第二张图片中,踏板偏移了 90°,因此您可以想象在相同的情况下,自行车会平稳推进。这个想法是,上面的插图就像一个传统的直列 4 缸发动机,而下面的插图就像一个带有交叉平面曲轴的 4 缸发动机。
这种布局提供了平滑的曲轴旋转,但正如牛顿第一定律所述,物体将在给定时间尝试保持其当前状态。这种曲轴设计源于对该定律的透彻理解和应用。
有关交叉平面曲轴的更多信息:
雅马哈技术:Crossplane 曲轴

Chassis and Newton’s Third Law
Newtonian mechanics are also reflected in Yamaha’s chassis and hull technologies with designs based on his Third Law for action and reaction. An easy way to visualize this is to imagine two swimmers underwater in a pool (#6). If one pushes the other, the reaction will force him in the opposite direction. Let’s see how the Third Law applies to Yamaha products.
我们的倾斜多轮 (LMW) 设计就是一个很好的例子。这项技术源于我们工程师的愿望,即让多轮车辆在转弯时仍能倾斜并提供传统摩托车的乐趣,并且是雅马哈设想的“不断增长的个人移动世界”的补充。
LMW 设计通过让左右前轮胎以跷跷板的方式移动来响应路面或底盘倾斜;当一个轮子上升时,另一个轮子下降(#7)。该运动由系统的平行四边形连杆控制。零件的平行四边形形状确保周围的连杆(以及轮子)保持平行,即使仅在一侧施加力也是如此。这是动作/反应(#8) 的一个很好的例子。物体上的推力伴随着相等的反作用力,而拉力伴随着相等的反作用力。对 LMW 平台如此重要的平行四边形连杆的设计是对牛顿第三定律以及大量测试和分析进行深入重新审视的结果。
轮胎和路面之间也有恒定的作用/反应,这使得加速和减速成为可能(#9)。此外,悬架具有弹簧,可以对道路不规则情况起作用并做出反应以吸收颠簸,因此该过程发生在底盘周围。
通过这种方式,牛顿力学的精神在 Tricity 和 NIKEN LMW 模型中都非常活跃(#10)。





Electronic Control and Newton’s Second Law
MOTOROiD is a proof-of-concept prototype first exhibited at the Tokyo Motor Show in 2017 and garnered significant attention (#11). Aimed at creating new forms of personal mobility in which the rider resonates harmoniously with the machine and to create a new Kando* experience, it features artificial intelligence and autonomous technology to achieve a high degree of control over its balance and attitude. This machine can sense its own state and adjust its center of gravity to rise off its kickstand and remain upright at a standstill unassisted (#12).
* Kando是一个日语单词,意思是当我们遇到具有非凡价值的东西时,我们会同时感受到深深的满足感和强烈的兴奋感。
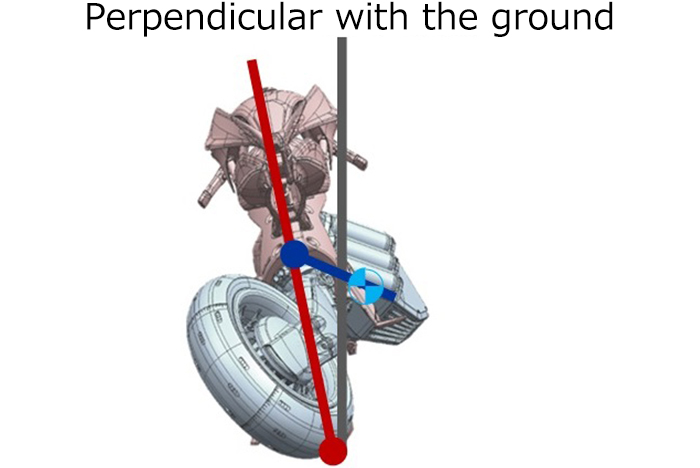
一个使MOTOROiD可能的新的布局和结构的关键技术是A莫如中号屁股CE NTER控制变体系(AMCES)。* AMCES电子控制重心MOTOROiD的中心和前轮和后轮接触之间的位置关系与地面点。牛顿力学也在这里起作用。这就像平衡扫帚或直立在手掌中的棍子(#13)。
*该技术旨在通过使用电子设备主动控制底盘本身并不断优化车辆姿态来稳定两轮车。
为什么摩托车首先会翻倒?虽然很少有人考虑过这个显而易见的问题,但我们重新审视了牛顿力学的核心,并将我们的技术 (waza) 和技能 (sube) 应用于它。事实上,在开发 AMCES 时,雅马哈工程师设计了一个公式来表达当自行车翻倒时会发生什么——可以说“摩托车摔倒的F=ma”。应用这个公式可以让 Yamaha 阐明摩托车失去平衡和翻倒背后的物理原理,通过反向工作,工程师们能够提出一种设计,让摩托车能够自己站起来。然后将其制成电子控制。 MOTOROiD 是将这种方法付诸实践的一个例子。
来自 MOTOROiD 各种传感器的数据以比每 0.0005 秒一次更快的速度发送到主控制单元,然后主控制单元将指令转发给执行器,这些执行器围绕 AMCES 轴(#14)以高精度旋转底盘部分,以控制机器的重心。这种控制的前提是牛顿的F=ma方程。您可以说 MOTOROiD 的开发理念基于牛顿定律,该定律控制着将力施加到物体上以产生加速度并使其移动。
牛顿力学跨越了几个世纪,并继续反映在许多雅马哈产品中。正如一位雅马哈工程师所说,“牛顿力学可能是最终的开发方法。”
有关 MOTOROiD 的更多信息:
检查 MOTOROiD