Examining MOTOROiD
介绍雅马哈发动机技术背后的故事。

概念


释放原型:
摆脱常规
“MOTOROiD”是一款概念验证实验电动摩托车,旨在实现骑手与机器和谐共鸣的新型个人移动方式。为了创造基于雅马哈 Jin-Ki-Kanno独家开发理念的 Kando * 新体验,MOTOROiD 是在“Unleashed Prototype”的概念下开发的。
* Kando是一个日语单词,意思是当我们遇到具有非凡价值的东西时,我们会同时感受到深深的满足感和强烈的兴奋感。
MOTOROiD通过人工智能和自主技术配备高精度平衡控制,可以感知自身状态并相应调整重心,从支架上站起来并保持直立。由于其人机界面(HMI),它还可以识别其所有者并向前迈进以与他/她见面,并根据骑手的行为做出反应。这些以及其他一些功能使 MOTOROiD 能够像其所有者的真正合作伙伴一样行事。
MOTOROiD 激发了未来移动性的愿景,使车辆超越简单的“移动工具”。以 AMCES 为基础,* MOTOROiD 具有全新的功能水平和全新的结构布局,雅马哈以获取为客户创造新价值的技术为目标,迎接了这些开发挑战。
* A莫如中号的屁股CE NTER控制变体系:该技术的工作原理是利用电子主动地控制机箱本身并不断优化车辆姿态的稳定两轮车辆。


技术
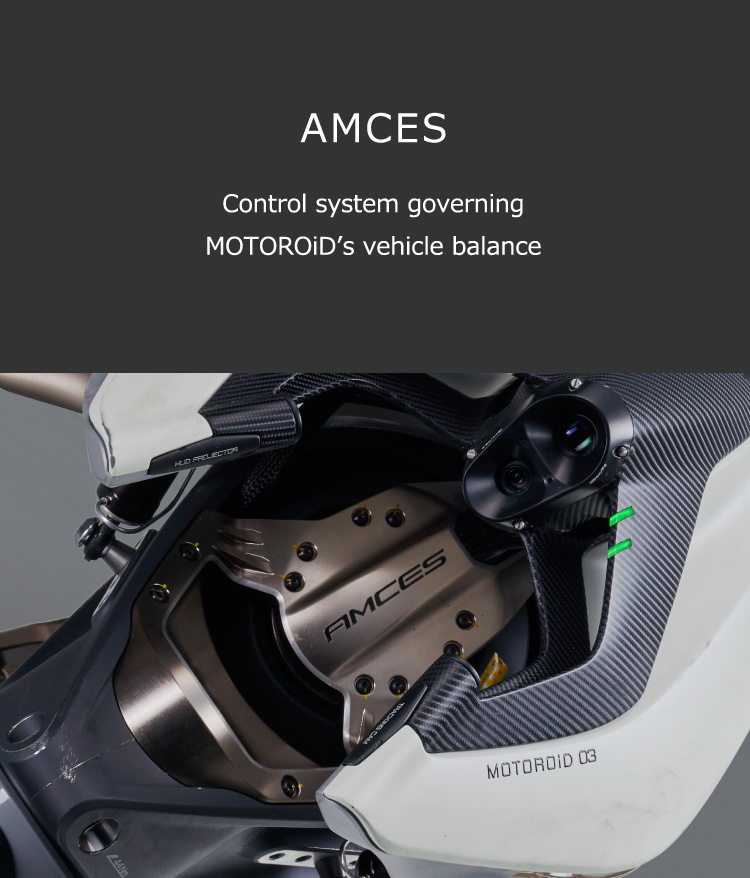
什么是 AMCES?
AMCES是雅马哈独有的技术,旨在对两轮电动摩托车的底盘进行电子控制和稳定。通过主动控制底盘本身,可以不断保持车辆的最佳姿态,让机器在静止或向前移动时保持直立。
AMCES 配置
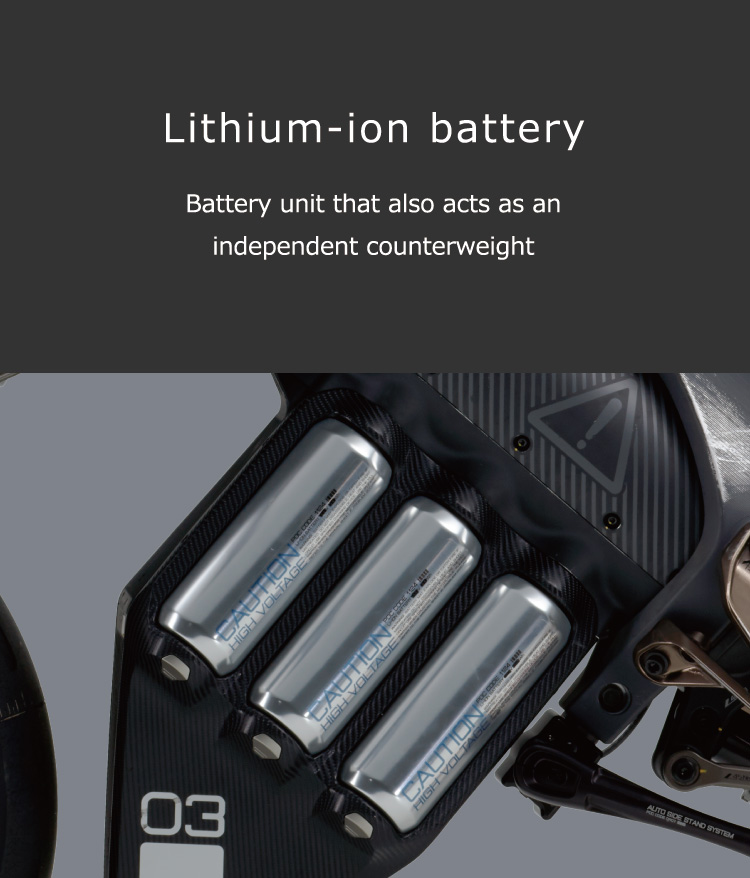
机器的姿态控制是通过机器的旋转部件(如电池、摇臂和后轮)围绕穿过车辆中心的 AMCES 轴(见图)来控制其重心来处理的。
在旋转过程中,电池向左或向右移动,充当配重,使机器保持平衡并在静止时保持直立。内部框架单元区域通过电子控制围绕AMCES轴旋转。
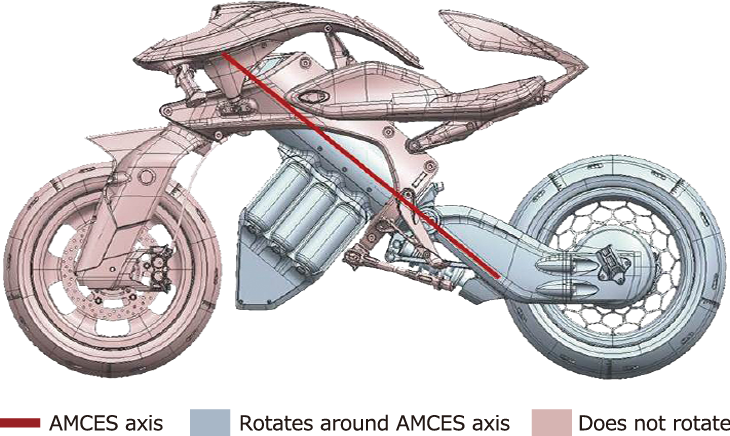
电池和摇臂等部件围绕 AMCES 轴旋转(最多向左或向右 50°),以在静止时保持平衡。

AMCES 控制组件
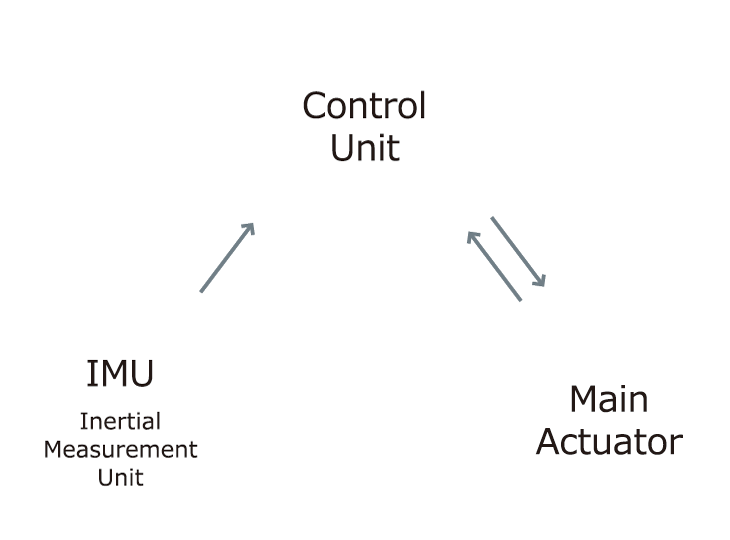
控制单元
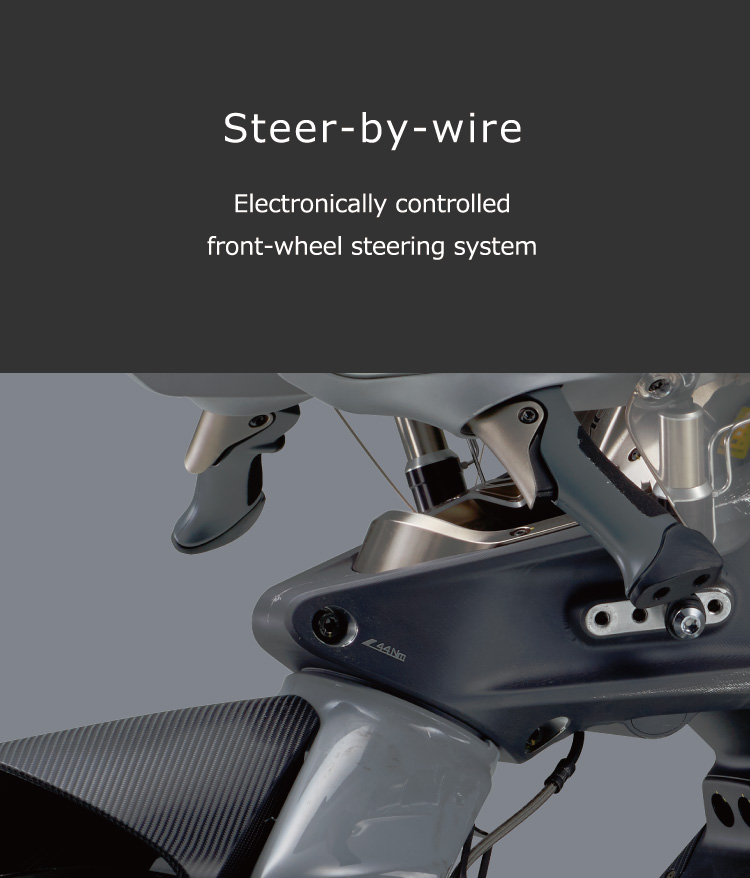
这集成并控制了 MOTOROiD 的所有功能和操作,从图像识别人工智能 (AI) 和惯性测量单元 (IMU) 数据到其他各种车辆数据。得益于高速处理,该装置不仅可以将指令转发到整个机器,还可以用于线控转向系统(电子前轮转向输入)、支架、动力总成、HMI 等。
惯性测量单元 (IMU)
IMU 感应机器的倾斜角度,并由检测轴旋转的陀螺仪传感器和检测每个方向速度的 G 传感器(加速度计)组成。 IMU 以每 0.0005 秒一次以上的速度向控制单元发送数据。
主执行器
主执行器从控制单元接收指令,以高精度围绕 AMCES 轴旋转零件,从而控制机器的重心。除了主执行器,MOTOROiD 还有其他几个大大小小的执行器。
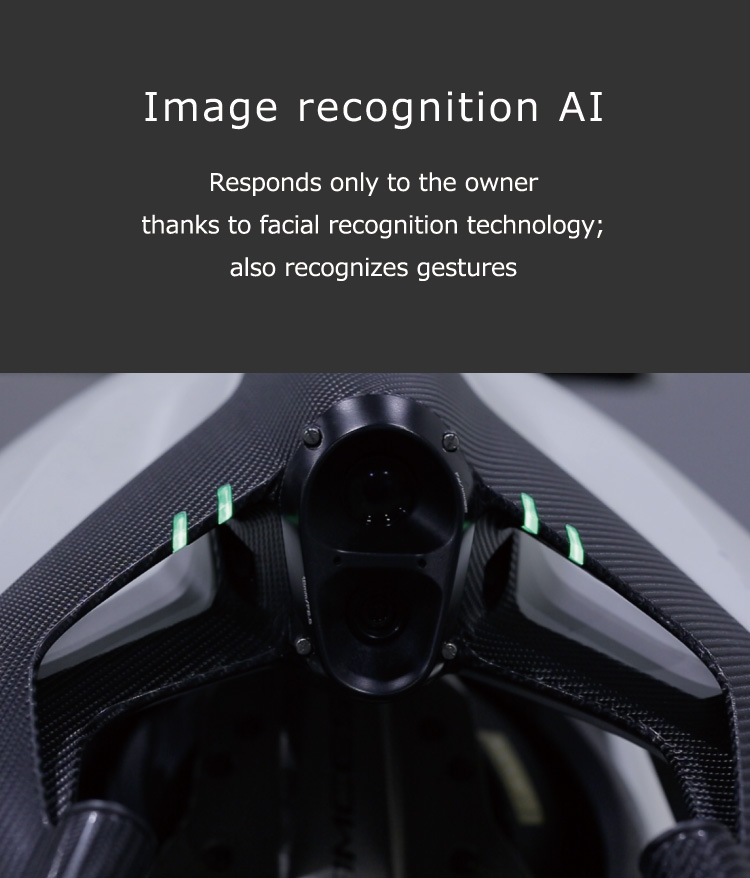
图像识别人工智能
面部识别系统使 MOTOROiD 能够仅对其所有者做出响应。它还能够识别手势,使 MOTOROiD 也可以响应手部动作,例如使用招手或抬起手掌来指示其开始或停止移动。系统的数据连续发送到控制单元,在那里收集并用作控制机器的反馈。

通过双镜头相机识别图像


MOTOROiD 的面部识别 (CGI)
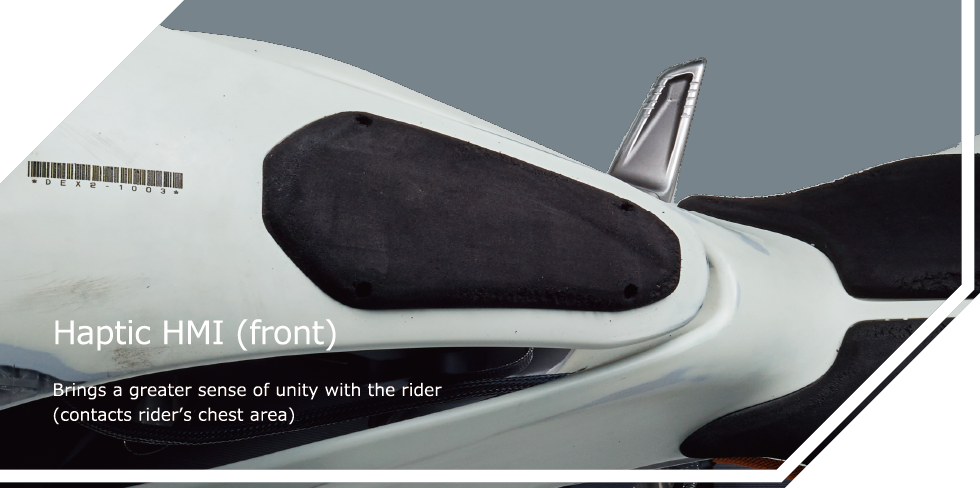
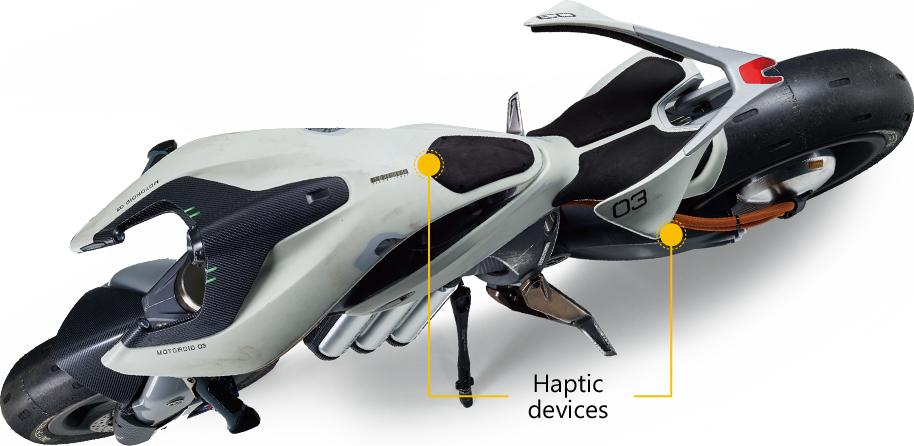
触觉人机界面
MOTOROiD 还具有触觉(通常称为“力反馈”)设备。触觉人机界面 (HMI) 的作用是在骑手和机器之间提供更大的统一感,因为它接触骑手的腰部和胸部区域,就好像车主被车辆拥抱一样。这些接触点旨在为骑手和机器之间提供更直观的反馈和互动形式。
特征图