Roboty jednoosiowe FLIP-X
Seria FLIP-X obejmuje 6 typów modeli w 29 wariantach, zapewniając szeroką gamę rozwiązań do różnych zastosowań.

Siłownik elektryczny składający się z serwomotoru prądu przemiennego, podstawy, śruby kulowej, pasa i prowadnicy liniowej. Ten siłownik jest uniwersalnym robotem, który sprawdzi się w wielu różnych zastosowaniach, takich jak montaż i kontrola.
Siłownik elektryczny wykorzystuje prowadnicę oraz śrubę kulową o dużym stopniu sztywności. Funkcję detektora położenia pełni resolwer cechujący się wysoką odpornością na warunki otoczenia. To zapewnia urządzeniu długą żywotność.
Przyczynia się również w dużym stopniu do obniżenia kosztów konserwacji po stronie klienta.
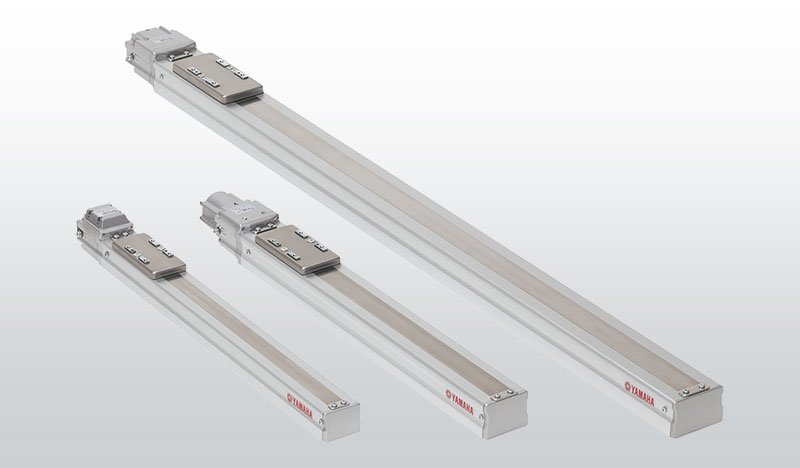
- Typ T Model kompaktowyT4L/T4LH, T5L/T5LH, T6L, T9/T9H
- Połączenie zalet kompaktowej konstrukcji z niską ceną. Doskonale sprawdzi się w charakterze siłownika mocowanego bezpośrednio na uchwycie.
- Typ N Model z napędem śrubowym N15/N15D, N18/N18D
- Możliwość pracy nawet przy dużych skokach ze stałą prędkością maksymalną, bez osiągania prędkości krytycznej. W standardzie dostępne również wersje z dwoma wózkami.
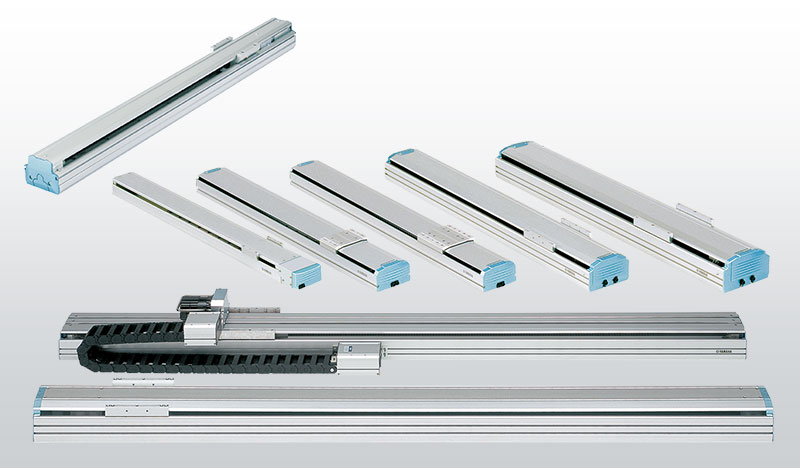
- Typ F, typ GF Model o wysokiej sztywnościF8/F8L/F8LH, F10/F10H, F14/F14H, F17/F17L, F20/F20N, GF14XL/GF17XL
- Sztywna konstrukcja aluminiowa, duży dopuszczalny moment udźwigu i wytrzymałość na obciążenia przesunięte. Ten model świetnie nadaje się do robotów kartezjańskich, które wymagają odpowiedniego usztywnienia ramienia oraz możliwości poruszania ramieniem ruchomym w obrębie całej osi.

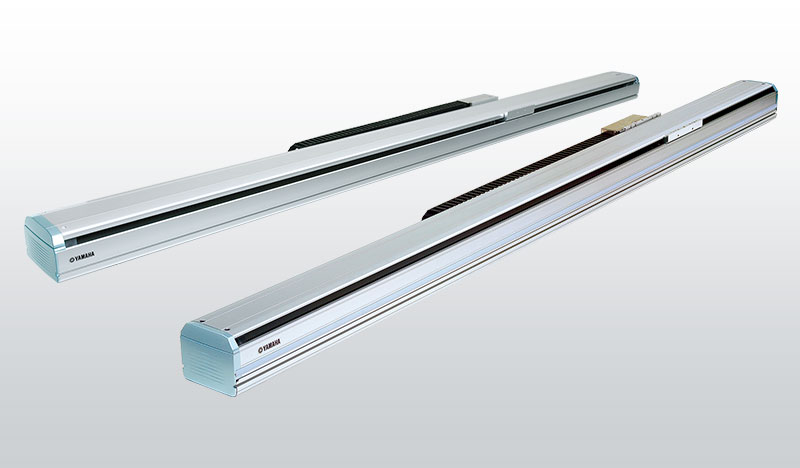
- Typ B Model z napędem z paskiem rozrządu B10, B14/B14H
- Maksymalna długość skoku: 3050 mm. Umożliwia transport na duże odległości pomiędzy procesami.

- Typ R Model z osią obrotowąR5, R10, R20
- Powtarzalna dokładność pozycjonowania ±30 s (0,0083°). Modele typu R można wykorzystywać w charakterze osi obrotowej w połączeniu z innymi robotami lub w szeregu innych zastosowań, takich jak stoły indeksujące. Napęd harmoniczny zapewnia dużą wytrzymałość i dokładność.
Cechy
01Resolwer przystosowany do pracy w trudnych środowiskach
Do wykrywania położenia silnika używany jest wysoce niezawodny resolwer. Zapewnia on stałe wykrywanie położenia nawet w środowiskach, w których występują cząsteczki pyłu i mgła olejowa. Resolwer zapewnia niezwykle wysoką rozdzielczość rzędu 20 480 impulsów na obrót.

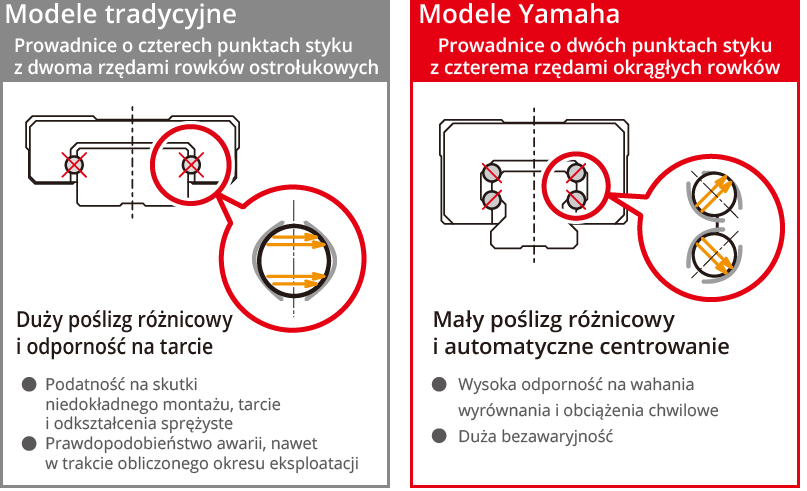
02Prowadnice o dwóch punktach styku z czterema rzędami okrągłych rowków zapewniają dużą odporność na obciążenia chwilowe
Prowadnice o dwóch punktach styku z czterema rzędami okrągłych rowków zmniejszają poślizg różnicowy. Poślizg różnicowy kuli jest mały w porównaniu z prowadnicami o czterech punktach styku z dwoma rzędami rowków ostrołukowych. To oznacza doskonałą jakość ruchu tocznego, nawet przy dużych obciążeniach chwilowych i małej dokładności powierzchni montażowej. Ponadto rzadziej dochodzi do usterek wynikających na przykład z nietypowego zużycia.
03Konfiguracja indywidualna każdego modelu na zamówienie
Aby złożyć specjalne zamówienie na dowolny z naszych modeli (z dwoma suwakami, z szerokimi suwakami itp.), skontaktuj się z przedstawicielem handlowym.
04Długi czas eksploatacji obniża koszty konserwacji i zarządzania
Nasze prowadnice i śruby kulowe o dużym stopniu sztywności przyczyniają się do znacznego obniżenia kosztów konserwacji i zarządzania. Informacje na temat oczekiwanej żywotności poszczególnych produktów w konkretnych warunkach można znaleźć w naszej witrynie internetowej.
Roboty jednoosiowe FLIP-X

Yamaha Motor Europe N.V.
German Branch Office, Robotics Business
Hansemannstrasse 12, 41468 Neuss, Alemania
Telephone : +49 2131 20 13 520 /
Email : info-ymeim@yamaha-motor.de
Web: http://www.yamaha-motor-im.eu/