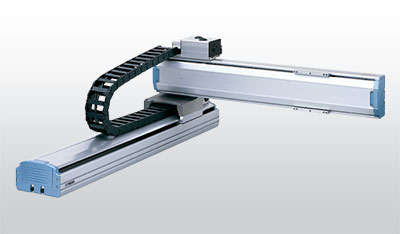
Roboty kartezjańskie XY-X
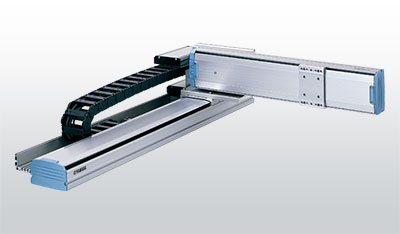
Szeroka gama robotów kartezjańskich serii XY-X o parametrach dostosowanych do potrzeb różnych klientów.
Pełna oferta robotów kartezjańskich o parametrach i rozmiarach dopasowanych do potrzeb użytkowników i szerokiego spektrum zadań.
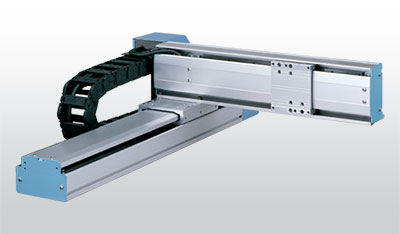
Siłownik elektryczny składa się z od 2 do 6 osi przesuwnych ustawionych prostopadle względem siebie.
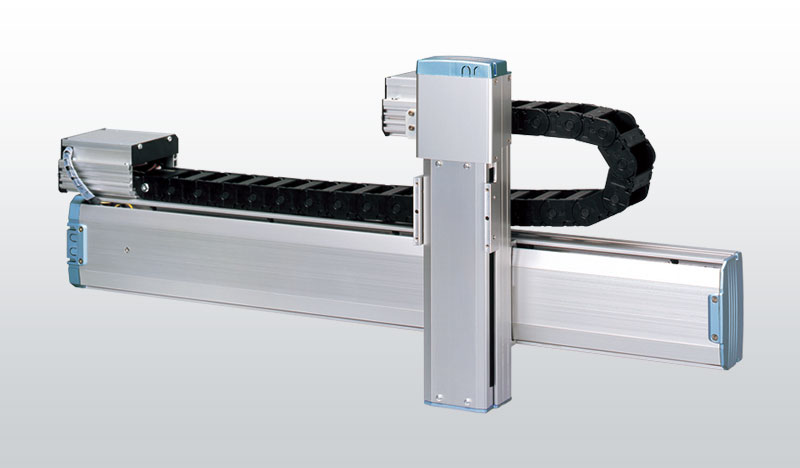
W bogatej ofercie wariantów i funkcji ramion — od niedrogich, kompaktowych ramion po ramiona przystosowane do przenoszenia ciężkich przedmiotów i transportu na duże odległości — każdy klient znajdzie produkt dostosowany do swoich potrzeb.
Ten siłownik elektryczny jest używany w wielu zastosowaniach, takich jak montaż, obróbka, wkładanie, wyjmowanie, przeładunek i pakowanie niewielkich, precyzyjnych podzespołów maszyn, podzespołów samochodowych oraz elementów elektrycznych do montażu na płytkach.

- Ramię
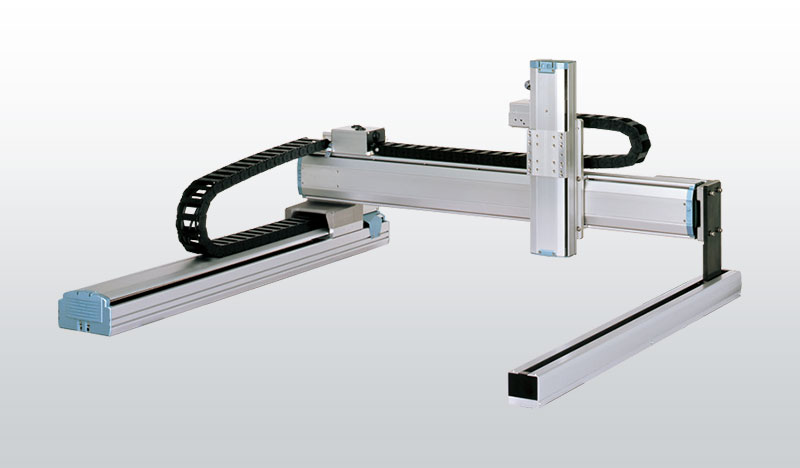
- Suwnica

- Ramię ruchome
- XZ

- Słup
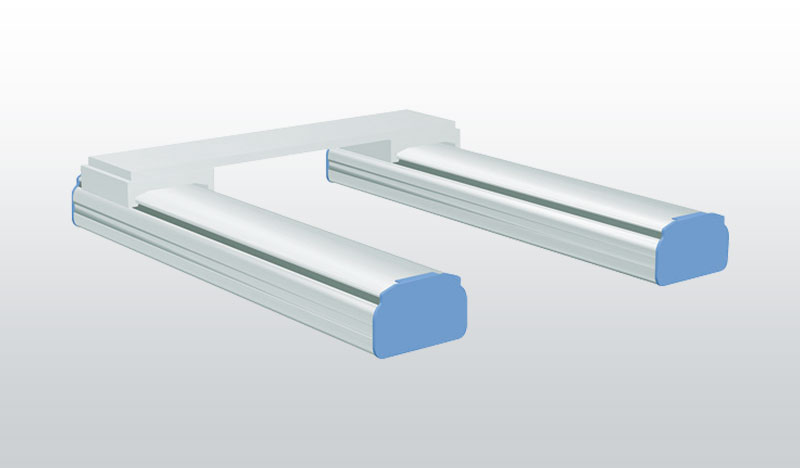
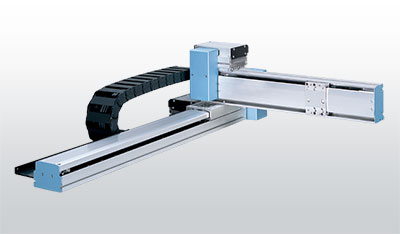
- Podwójny napęd synchroniczny
- Podwójny napęd synchroniczny składa się z dwóch osi sterowanych synchronicznie. Dzięki temu robot kartezjański nadaje się do przenoszenia ciężkich przedmiotów i transportu na duże odległości.
Uwaga: podwójny napęd synchroniczny jest dostępny na specjalne zamówienie.
Warianty

- PXYx
- FXYx
- FXYBx
- SXYx

- MXYx
- SXYBx

- NXY

- NXY-W
- HXYx

- HXYLx
W przypadku specyfikacji obejmującej co najmniej 3 osie można wybrać jeden z następujących wariantów:
- Typ z podstawą mocowaną na osi Z i ruchomym stołem
- Typ ze stołem mocowanym na osi Z i ruchomą podstawą
Cechy
01Resolwer zapewnia trwałe i niezawodne wykrywanie położenia
Detektor położenia jest resolwerem o prostej, ale solidnej konstrukcji pozbawionej podzespołów elektronicznych i elementów optycznych, dzięki czemu cechuje go niezwykła wytrzymałość w trudnych warunkach oraz mała awaryjność. Dzięki swojej konstrukcji resolwer nie wykazuje żadnych problemów związanych z wykrywaniem, jakie spotyka się w innych detektorach, takich jak enkodery optyczne, w których zdarzają się usterki podzespołów elektronicznych lub fałszywe odczyty pozostałej na tarczy wilgoci lub oleju. Charakterystyka mechaniczna, zarówno w przypadku wartości bezwzględnych, jak i przyrostowych, jest wspólna dla wszystkich kontrolerów, co oznacza możliwość przechodzenia między specyfikacjami opartymi na wartościach bezwzględnych i przyrostowych przy minimalnej konfiguracji parametrów.
Nawet w przypadku całkowitego wyczerpania akumulatora wartości absolutnych robot XY-X może utrzymać ciągłość pracy, bazując na danych przyrostowych, co oznacza brak konieczności zatrzymywania linii produkcyjnej w razie wystąpienia problemów. Obwody podtrzymujące zostały całkowicie przeprojektowane i obecnie okres podtrzymywania wynosi do jednego roku.
02Oszczędność pieniędzy
Zredukowanie liczby części przy jednoczesnym zwiększeniu wydajności umożliwiło nam obniżenie cen. Zastosowanie wbudowanego resolwera pozwoliło obalić mit, że urządzenia działające w oparciu o wartości absolutne muszą być drogie. Ponadto podzespoły mechaniczne nie ulegają zmianie niezależnie od tego, czy zastosuje się specyfikację opartą na jednostkach przyrostowych czy bezwzględnych.
03Łatwa konserwacja
Pomimo zastosowania zintegrowanej konstrukcji konserwacja jest prosta, ponieważ poszczególne podzespoły, takie jak silniki i śruby kulowe, można wymieniać pojedynczo.
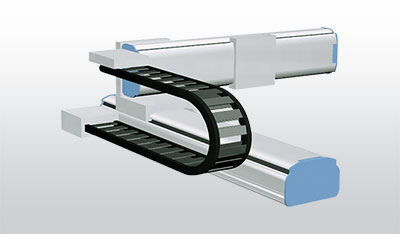
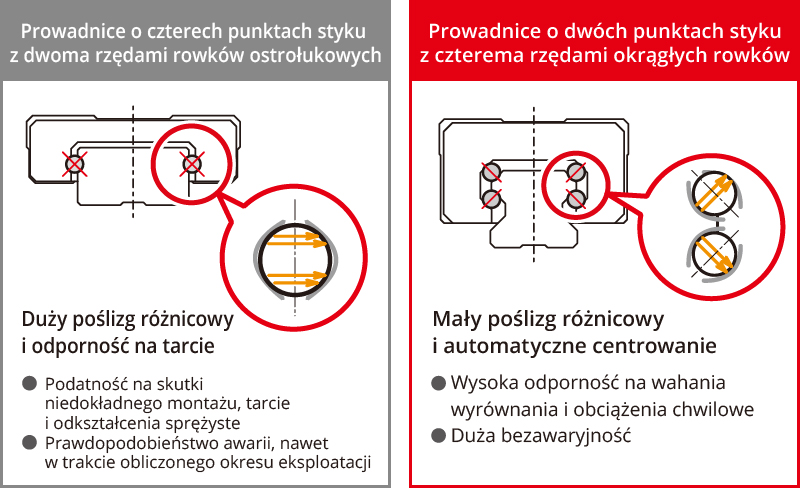
04Prowadnice o dwóch punktach styku z czterema rzędami okrągłych rowków
Prowadnice o dwóch punktach styku z czterema rzędami okrągłych rowków zmniejszają poślizg różnicowy. Poślizg różnicowy kuli jest mały w porównaniu z prowadnicami o czterech punktach styku z dwoma rzędami rowków ostrołukowych. To oznacza doskonałą jakość ruchu tocznego, nawet przy dużych obciążeniach chwilowych i małej dokładności powierzchni montażowej. Ponadto rzadziej dochodzi do usterek wynikających na przykład z nietypowego zużycia.
Roboty kartezjańskie XY-X

Yamaha Motor Europe N.V.
German Branch Office, Robotics Business
Hansemannstrasse 12, 41468 Neuss, Alemania
Telephone : +49 2131 20 13 520 /
Email : info-ymeim@yamaha-motor.de
Web: http://www.yamaha-motor-im.eu/