予知保全情報のリアルタイム出力機能を搭載 高機能2軸ロボットコントローラ「RCX320」新発売
2019年11月1日発表
ヤマハ発動機株式会社は、高い性能と使い勝手の良さによりベストセラーとなった多軸ロボットコントローラ「RCX340」の2軸モデル「RCX320」を12月1日より発売します。
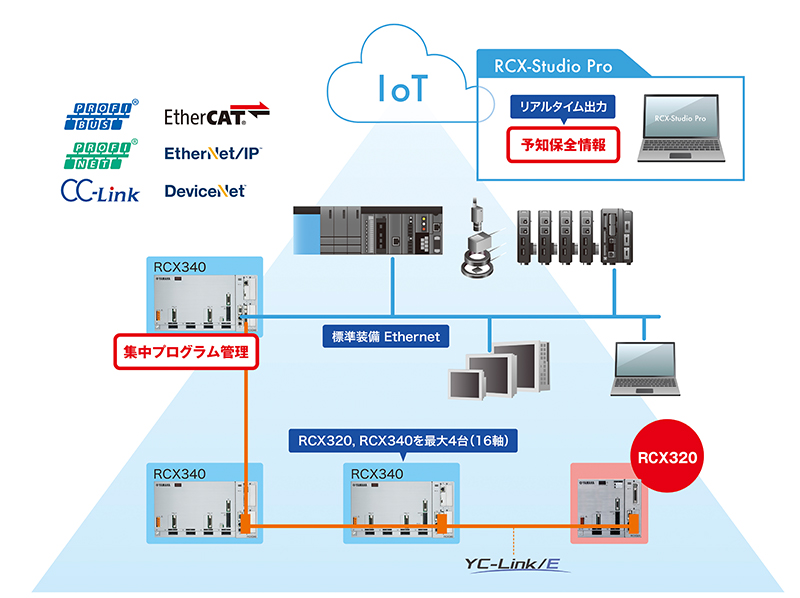
「RCX320」は、「RCX340」の高度な機能性と柔軟な拡張性を継承しており、複数台ロボットの同期制御など、ハイレベルな設備構築を実現します。従来機「RCX221/222」に対し、マルチタスク数、メモリ容量、ポイント数など基本性能を大幅に向上しました。さらにリンク機能「YC-Link/E」や、Ethernet/IP、EtherCAT、PROFINETに対応し、予知保全情報のリアルタイム出力を新たに搭載しました。
これにより、柔軟な設備構築、各種アプリケーションの実行速度の高速化、より快適な操作性、より高精度な軌跡精度を実現し、“止まらない生産ライン”の実現に貢献します。
なお本製品は、12月18日(水)から21日(土)まで東京ビッグサイトにて開催される「2019 国際ロボット展」に展示します。

| 名称 | 発売日 | メーカー希望小売価格 | 販売計画 |
|---|---|---|---|
| ロボットコントローラ「RCX320」 | 2019年 12月1日 | 220,000円 (消費税別途) |
3,000台 (発売から1年間) |
〈RCX320の主な特徴〉
基本性能の大幅向上
従来機「RCX221/222」に対し、基本性能を大幅に向上させました。
・マルチタスク:最大16タスク (RCX221/222:最大8タスク)
・メモリ容量:2.1MB (RCX221/222:364KB)
・プログラム数:最大100プログラム (RCX221/222同等)
・ポイント数:30,000ポイント(RCX221/222:10,000ポイント)
小型直交ロボットから大型直交ロボットまでを1台で制御可能
当社の2軸直交ロボット「XYXシリーズ」、サーボモータ単軸ロボット「FLIP-Xシリーズ」やリニアモータ単軸ロボット「PHASERシリーズ」を使用した2軸ロボットなど、当社の小型から大型まで2軸ロボット全てに使用することが可能です。
デュアルロボットを簡単制御
2軸間を同期駆動させるデュアルロボットを簡単に制御できます。
6軸※の制御をローコストで実現
2軸ロボットの制御だけでなく、コントローラ間通信「YC-Link/E」を使用し「RCX340」とのリンクが簡単に行えます。6軸※の制御がローコストで実現可能です。
※. 垂直多関節ロボットYAシリーズは対象外。
複数台ロボットの同期制御が可能
コントローラ間通信「YC-Link/E」を使用することで、直交ロボット+スカラロボットなどの複数台ロボットの同期制御が可能です。マスタコントローラのみのプログラムで実行できるため、システム立ち上げ時間の大幅な短縮に貢献します。「RCX320」コントローラは、マスタ仕様、スレーブ仕様の両方に対応可能なため、柔軟にシステムを構築できます。
※コントローラ間通信「YC-Link/E」により「RCX320」および「RCX340」を最大4台まで接続可能。
充実したフィールドネットワーク対応およびオプション機能
Ethernet/IP、EtherCAT、CC-Link、DeviceNet、PROFINET、PROFIBUSの6種類の国際フィールドネットワークに対応しています。RS-232CとEthernetポートを標準装備し、グリッパ、ビジョンシステムなどのオプション機能にも対応しているため、ニーズに合わせたシステム構築が可能となります。
CPU処理能力約3倍
従来機に対しCPUの処理能力が約3倍になりました。動作軌跡、内部処理時間など制御性能が大幅に向上します。
軌跡精度の向上
「RCX340」同等のサーボ・モーションエンジンを搭載しているため、従来機種に比べ追従性がアップし、なめらかな動きを実現しました。位置決め時間の短縮や軌跡精度の向上を図ります。
サポートソフト「RCX-StudioPro」対応
「RCX340」と共通の「RCX-StudioPro」に対応しています。エミュレータ機能を搭載しているため、コントローラ無しでもプログラム作成、デバックが可能です。2点間のサイクルタイムも簡単に算出でき、最適なロボットの選定が簡単に行えます。立ち上げ後もリアルタイムトレースや複数タスクのデバック情報を同時に表示させることができ状況確認が行えます。
産業用 Ethernetオプション リアルタイム出力機能
産業用Ethernetオプション(Ethernet/IP, EtherCAT, Profinet)を選択した場合、エラーステータス、現在位置、電流値、モータ負荷率、稼働時間など、予知保全に必要な情報をリアルタイムに出力し、“止まらない生産ライン”を実現します。
〈RCX320基本仕様〉
| 項目 | 内容 | |||||
|---|---|---|---|---|---|---|
| 基本仕様 | 適用ロボット | 単軸ロボット、リニア単軸ロボット、直交型ロボット、ピック&プレイスロボット | ||||
| 接続モータ容量 | 2軸合計1200W以下 | |||||
| 電源容量 | 2400VA | |||||
| 外形寸法 | W213×H195×D130mm(本体のみ) | |||||
| 重量 | 3.6kg(本体のみ) | |||||
| 入力電源 | 制御電源 | 単相AC200〜230V±10% 50/60Hz | ||||
| 主電源 | 単相AC200〜230V±10% 50/60Hz | |||||
| 軸制御 | 制御軸数 | 最大2軸 コントローラ間通信YC-Link/Eにより、「RCX340」および「RCX320」を4台まで接続可能 |
||||
| 駆動方式 | ACフルデジタルサーボ | |||||
| 位置検出方式 | レゾルバ、磁気式リニアスケール | |||||
| 制御方式 | PTP動作(Point to Point)、アーチモーション、直線補間、円弧補間 | |||||
| プログラミング | プログラム言語 | ヤマハ BASIC Ⅱ(JIS B8439 〈SLIM言語〉準拠) | ||||
| マルチタスク | 最大16タスク | |||||
| シーケンスプログラム | 1プログラム | |||||
| メモリ容量 | 2.1MB(プログラムとポイントの合計容量) (最大ポイント数使用時のプログラム使用可能容量は300KB) |
|||||
| プログラム | 100プログラム(最大プログラム数) 9999行(1プログラム最大行数) |
|||||
| ポイント | 30000ポイント(最大ポイント数) | |||||
| ポイント教示方式 | MDI(座標値入力)、ダイレクトティーチ,ティーチングプレーバック、 オフラインティーチング(外部からのデータ入力) |
|||||
| 外部入出力 | SAFETY | 入力 | 非常停止入力2系統 自動モード入力2系統(CE仕様のみ有効) |
|||
| 出力 | 非常停止接点出力2系統 イネーブル接点出力2系統(PBX-E使用時のみ有効) モータパワーレディ出力2系統 |
|||||
| ブレーキ出力 | トランジスタ出力(PNPオープンコレクタ) | |||||
| 外部通信 | RS-232C: | 1CH(D-SUB 9ピン 〈メス〉) | ||||
| Ethernet: | 1CH(IEEE802.3u/IEEE802.3準拠) 100Mbps/10Mbps(100BASE-TX/10BASE-T) Auto Negotiation対応 |
|||||
| RS-422: | 1CH(PBX専用) | |||||
| オプション | オプションボード | パラレルI/Oボード | 標準仕様 | 専用入力 8点、専用出力 9点 汎用入力 16点、汎用出力 8点 (最大1ボード、NPN/PNP 仕様選択) |
||
| 拡張仕様 | 汎用入力 24点、汎用出力 16点 (最大4ボード、NPN/PNP 仕様選択) |
|||||
| CC-Link ボード Ver1.1/2.0 | リモートI/O | 専用入出力:各16点 汎用入出力:各96点 |
||||
| DeviceNetTM ボード | ||||||
| EtherNet/IPTM ボード | ||||||
| PROFIBUS ボード | リモートレジスタ | 入出力:各16ワード | ||||
| PROFINET ボード | ||||||
| EtherCAT ボード | ||||||
| YC-Link/E ボード (マスタ/スレーブ) |
通信周期:1ms、制御周期:最小1ms / 最大8ms、最大ロボット台数:4 台 最大制御軸数:全14 軸(マスタコントローラ 2 軸を含む)スレーブのみで最大12 軸 |
|||||
| YRG(グリッパ)ボード | 位置検出方式:光学式ロータリエンコーダ、最小設定距離:0.01mm 速度設定:パラメータ最高速度に対し20~100%にて設定、グリッパ接続台数:最大2 台 駆動電源:DC 24V ± 10% 1.0A Max |
|||||
| トラッキングボード | エンコーダ接続台数:最大2 台、対象エンコーダ:26LS31/26C31 相当ラインドライバ(RS422 準拠) エンコーダ電源:DC5V(2 カウンタ(ch) 合計500mA 未満)( コントローラより供給) |
|||||
| iVY2ユニット | カメラ画素数:最大500 万画素、品種設定数:254 品種、カメラ接続台数:最大2 台 電源:DC24V ± 10% 1.5A Max |
|||||
| プログラミングボックス | PBX、PBX-E | |||||
| アブソバッテリ | 3.6V 2750mAH / 軸 バックアップ保持期間:約1 年 | |||||
| パソコン用ソフト | RCX-Studio Pro | |||||