小型・低価格アクチュエータ「トランサーボ」シリーズにラインナップ追加 ヤマハトランサーボ「STH、RF、BDタイプ」新発売
2013年2月27日発表
ヤマハ発動機株式会社は、ステッピングモータを使用した単軸ロボット「トランサーボ」シリーズに、3種類の製品を新たに開発し、2013年3月下旬より発売します。
「トランサーボ」シリーズは、ステッピングモータを使用した小型・低価格アクチュエータで、これまでは、スライダー仕様「SSタイプ」、ロッド仕様「SRタイプ」の2種類でした。今回、スライドテーブル仕様の「STHタイプ」、ロータリー仕様の「RFタイプ」、ベルト仕様の「BDタイプ」をラインナップに追加します。
生産設備に様々な電動機器が要求されるなか、今回のラインナップ追加により、お客様の幅広い要求に応える事が可能となります。なお、コントローラは既存タイプで使用している「ロボットポジショナーTS-S」との組合せが可能な為、これまで通りの操作性・制御性を継承しています。


名称 |
ヤマハ「トランサーボ」シリーズ 「STH03/STH04/STH06、RF02/RF03/RF04、BD04/BD05/BD07」 |
|---|---|
| 発売予定日 | 2013年3月下旬 |
| 価格 |
STH03-50(ストローク50mm):オープン価格 RF02:オープン価格 BD04-300(ストローク300mm):オープン価格 |
| 初年度販売計画 | STHタイプ3,000台、RFタイプ3,000台、BDタイプ1,000台 |
市場背景と製品の概要
これまでの生産設備において、単純な2点間の位置決め動作は、空気圧機器の使用が主流であったが、電動機器の強みである多点位置決め、円滑な加減速運転、安定動作、省エネなどを理由に、小型で低価格のアクチュエータの需要が年々増加している。空気圧機器市場は既に飽和した状態で、今後市場が拡大する傾向には無いと予測されている一方、電動機器市場は徐々に市場規模が拡大し、今後も緩やかではあるが世界規模で更に増加していくと予測される。
今回の「トランサーボ」シリーズのラインナップ追加は、拡大する市場に対し柔軟にお客様の期待に応える事が可能となり、従来の主要顧客である自動車関連、電気・電子業界に加えて、医薬品・食品分野の新しい業界への採用も大きく期待される。
製品の特徴
「トランサーボ」シリーズに追加となるラインナップ
2009年4月に「トランサーボ」シリーズのスライダー仕様「SSタイプ」発売後、翌年9月にロッド仕様の「SRタイプ」を発売しましたが、新しいタイプの追加は約3年ぶり。各タイプ共に、大小3種の仕様を用意しており、お客様の細かな要求にも柔軟に応える事が可能。
- ①
- 一スライドテーブル仕様「STHタイプ」
コンパクトで高剛性。モータストレートと折曲げ仕様を用意
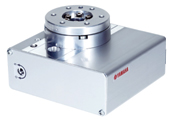
- ②
- ロータリー仕様「RFタイプ」
要求の高かった小型の回転軸。高精度軸受け仕様も用意
- ③
- ベルト仕様「BDタイプ」
コンパクトサイズながら、最大2,000ストロークまで対応
位置検出器は上位機種と同様のレゾルバを採用
位置検出器には従来機種に加え、上位機種でも採用しているレゾルバを使用。レゾルバは構造上、その本体には外乱の影響を受けやすい電子部品を使用しておらず、自動車・航空機・医療などの信頼性を最も重要視されるシーンに数多く採用されています。小型・低価格でありながら、上位機種と同じ耐環境性、高信頼性が期待出来ます。
専用コントローラ「ロボットポジショナーTS-S」で制御可能
「トランサーボ」シリーズで使用する「ロボットポジショナーTS-S」が今回の製品にも使用が可能です。なお、単軸ロボット「FLIP-X」シリーズ、リニア駆動の「PHASER」シリーズで使用するロボットポジショナー「TS-X」、「TS-P」とも、操作・制御方法が同様です。
多種多様なロボットを選択しても、一貫したコントローラの選択を行う事で、操作・制御方法を統一でき、更にオプション品の共通化も図れます。
基本仕様
トランサーボシリーズ 「STHタイプ」本体
| 型式 | STH03-S | STH03-R/L※4 | STH04-S | STH04-R/L※4 | STH06-S | STH06-R/L | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| モデル | ストレ-ト | モ-タ折り返し (右/左) |
ストレ-ト | モ-タ折り返し (右/左) |
ストレ-ト | モ-タ折り返し (右/左) |
|||||||
| モ-タ | 20角ステップ モ-タ |
20角ステップ モ-タ |
28角ステップ モ-タ |
28角ステップ モ-タ |
42角ステップ モ-タ |
42角ステップ モ-タ |
|||||||
| 分解能 | 4096 | 4096 | 4096 | 4096 | 20480 | 20480 | |||||||
| 繰返し位置決め精度(mm)※1 | ±0.05 | ±0.05 | ±0.05 | ±0.05 | ±0.05 | ±0.05 | |||||||
| 駆動方式 | すべりねじ | すべりねじ +ベルト |
すべりねじ | すべりねじ +ベルト |
すべりねじ | すべりねじ +ベルト |
|||||||
| リ-ド(mm) | 4 | 8 | 4 | 8 | 5 | 10 | 5 | 10 | 8 | 16 | 8 | 16 | |
| 最高速度 (mm/sec)※2 |
200 | 400 | 200 | 400 | 200 | 400 | 200 | 400 | 150 | 400 | 150 | 400 | |
| 最大可搬質量(kg) | 水平 | 2 | 1 | 2 | 1 | 6 | 4 | 6 | 4 | 9 | 6 | 9 | 6 |
| 垂直 | 0.5 | 0.25 | 0.5 | 0.25 | 2 | 1 | 2 | 1 | 4 | 2 | 4 | 2 | |
| ストローク(mm) | 50/75 | 50/75 | 50/100 | 50/100 | 50/100/150 | 50/100/150 | |||||||
トランサーボシリーズ 「RFタイプ」本体
| 型式 | RF02 | RF03 | RF04 | |||
|---|---|---|---|---|---|---|
| モデル | 標準/高精度 | 標準/高精度 | 標準/高精度 | |||
| モ-タ | 20角ステップモ-タ | 28角ステップモ-タ | 42角ステップモ-タ | |||
| 分解能 | 4096 | 4096 | 20480 | |||
| トルクタイプ | 標準 | 高トルク | 標準 | 高トルク | 標準 | 高トルク |
| 回転トルク(N・m) | 0.2 | 0.3 | 0.8 | 1.2 | 6.6 | 10 |
| 最大押当てトルク(N・m) | 0.1 | 0.15 | 0.4 | 0.6 | 3.3 | 5 |
| 繰返し位置決め精度(度) | ±0.05 | ±0.05 | ±0.05 | |||
| バックラッシ(度) | ±0.5 | ±0.5 | ±0.5 | |||
| 駆動方式 | 特殊ウォ-ムギア+ベルト | 特殊ウォ-ムギア+ベルト | 特殊ウォ-ムギア+ベルト | |||
| 最大慣性モ-メント(kg・m2) | 0.0018 | 0.004 | 0.012 | 0.027 | 0.04 | 0.1 |
| 最高速度(度/sec)※3 | 420 | 280 | 420 | 280 | 420 | 280 |
| 回転範囲(度) | 310 | 320 | 320 | |||
トランサーボシリーズ 「BDタイプ」本体
| 型式 | BD04 | BD05 | BD07 | |||
|---|---|---|---|---|---|---|
| モ-タ | 28角ステップモ-タ | 42角ステップモ-タ | 56角ステップモ-タ | |||
| 分解能 | 4096 | 20480 | 20480 | |||
| 繰返し位置決め精度 (mm)※1 |
±0.1 | ±0.1 | ±0.1 | |||
| 駆動方式 | ベルト | ベルト | ベルト | |||
| 相当リ-ド゙(mm) | 48 | 48 | 48 | |||
| 最高速度(mm/sec)※2 | 1100 | 1400 | 1500 | |||
| 最大可搬質量水平(kg) | 1 | 5 | 14 | |||
| ストロ-ク(mm) | 300,500,600,700,800, 900,1000 |
300,500,600,700,800, 900,1000,1200,1500, 1800,2000 |
300,500,600,700,800, 900,1000,1200,1500, 1800,2000 |
|||
- ※ 1.
- 片振りでの繰り返し位置決め精度
- ※ 2.
- 搬送質量により最高速度が変わります
- ※ 3.
- 慣性モーメントにより最高速度が変わります
- ※ 4.
- STH-03-R/L、STH04-R/Lは50stでのブレーキ付きは対応できません