MOTOROiD 解体新書
第45回 東京モーターショーで公開されたコンセプトモデルを紹介するコンテンツです。

コンセプト


アンリーシュド・プロトタイプ;
常識からの解放
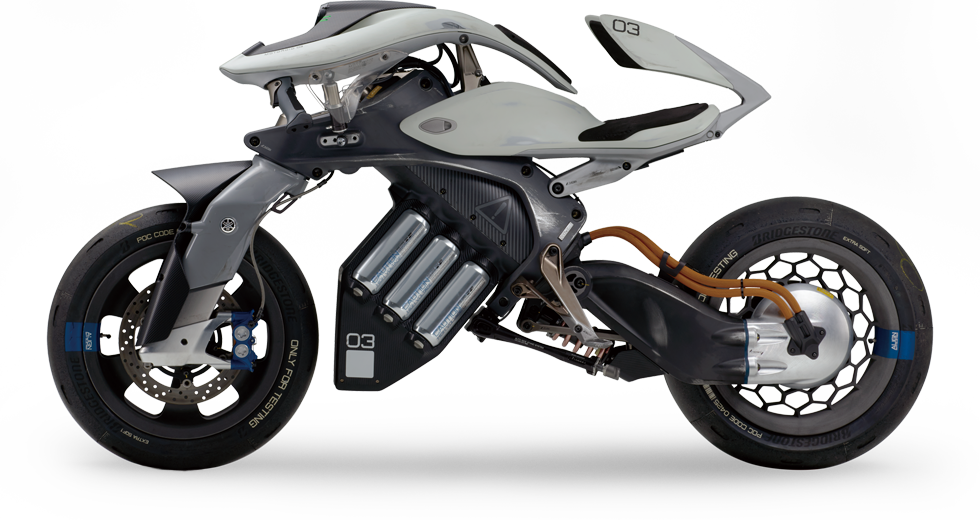
「MOTOROiD」(モトロイド)は“人とマシンが共響するパーソナルモビリティ”をめざした概念検証実験EVモデルです。人機官能に基づく新しい感動体験の創出を目的に、“アンリーシュド・プロトタイプ”(UNLEASHED PROTOTYPE; 常識からの解放)をコンセプトに開発しました。
知能化と自律技術を適用した高度なバランス制御を実装、マシンが自らの状態をセンシングして重心移動によって起き上がり、そのまま不倒状態を保ちます。またオーナーを認識して歩み寄ってくるほか、ライダーアクションに呼応するような反応を見せるHMI機能など、さまざまな機能を備え、まるでパートナーのように振る舞います。
“移動の道具”を超えたモビリティの未来像の期待をふくらませます。”AMCES” ※を中心としたまったく新しいレイアウトと機能を備え、ヤマハはこうしたチャレンジに取り組みながら、新しい価値を生み出す技術の獲得をめざしています。
※AMCES ;アムセス(Active Mass CEnter control System)。二輪の車体を電子制御で安定化することを目指した技術。車体をアクティブ制御する事で、常に車両の姿勢を最適化するシステム。


テクノロジー
AMCES(アムセス)とは
「MOTOROiD」に搭載のAMCESとは、EV自動二輪車の車体を電子制御し、安定化させることを目指したヤマハ独自の技術です。車体をアクティブ制御することで、常に車両の姿勢を最適に維持し、車両自身で不倒静止・前進することが可能です。
AMCESの仕組み
車両の姿勢制御は、AMCES軸(図参照)を回転させ重心をコントロールして行います。この重心をコントロールするために、バッテリー、リアアーム、リアホイール周りなどがAMCES軸を中心に回転します。
AMCES軸が回転するとバッテリーは左右どちらかに振られウエイト(錘)の役割を果たしバランスをとり不倒静止状態を維持できます。AMCES軸をもつインナーフレームユニットが電子制御で回転する仕組みです。
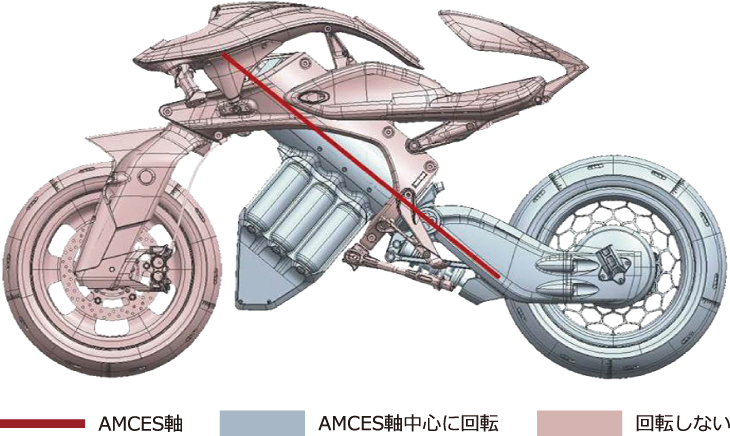
AMCES軸を中心にバッテリーやリアアームなどが回転しバランスをとり不倒静止状態を維持。回転領域は左右50度まで

AMCES 制御システム
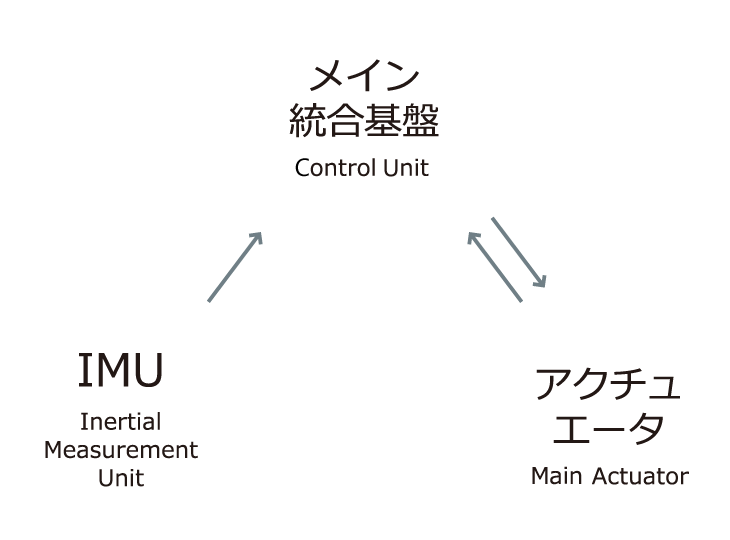
メイン統合基盤
「MOTOROiD」全体を統合制御する基盤です。画像認識AIからの情報、IMUで得た車両情報、その他各情報を統合制御。高速演算処理により、AMCESだけでなくステアバイワイヤ(電子制御前輪操舵)や、サイドスタンド、パワートレイン、HMIなど車両全体に指令を送ります。
IMU
ヘッドパイプ近傍に配した「IMU」(Inertial Measurement Unit)が車両の傾きを検知します。このIMUは、軸回転の動きを検出するジャイロセンサーと、各方向の加速度を検出するGセンサー(加速度センサー)で構成されます。IMUからの情報は2000分の1秒以下の精度でメイン統合基盤に送られます。
アクチュエータ
メイン統合基盤からの指令を受けたアクチュエータは、高精度でAMCES軸を回転させ、重心をコントロールします。「MOTOROiD」には、AMCES軸の制御だけでなく、大小さまざまなアクチュエータが搭載されています。
画像認証AI
顔認識機能によりオーナーのみに反応するシステムです。ジェスチャー認識機能も備え、手招きなどの仕草をキーに走行などの動作開始、停止が可能です。情報は常時メイン統合基盤へと集約し、車両制御にフィードバックします。

2眼カメラによる画像認識


MOTOROiDの顔認識イメージ
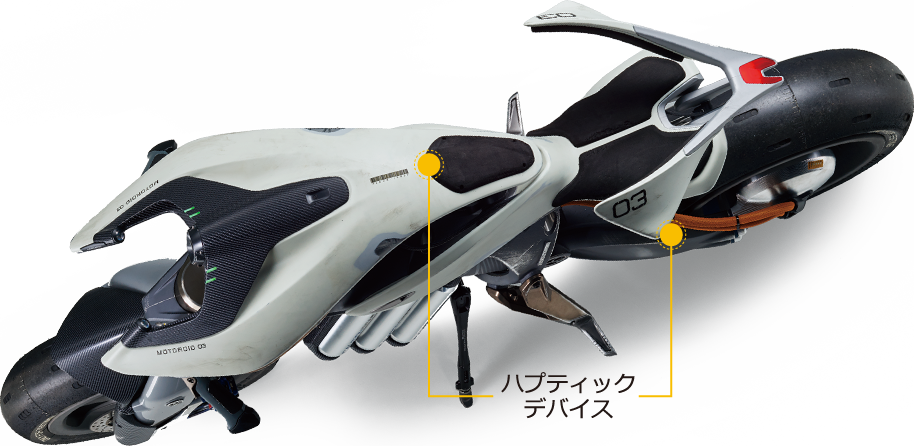
ハプティックHMI
「MOTOROiD」にはハプティックデバイスを搭載しました。ハプティックHMI※の考えに基づきライダーとマシンの一体感を追求したもので、ライダーのウエスト部をマシンが抱き抱えるようにフィット。マシンがライダーに触れながら、直観的な情報のやり取りを目指します。
※Haptic Human-Machine Interface
フィーチャーマップ