6軸「IMU」搭載による電子制御システム
ヤマハ発動機の技術ストーリーをご紹介します。
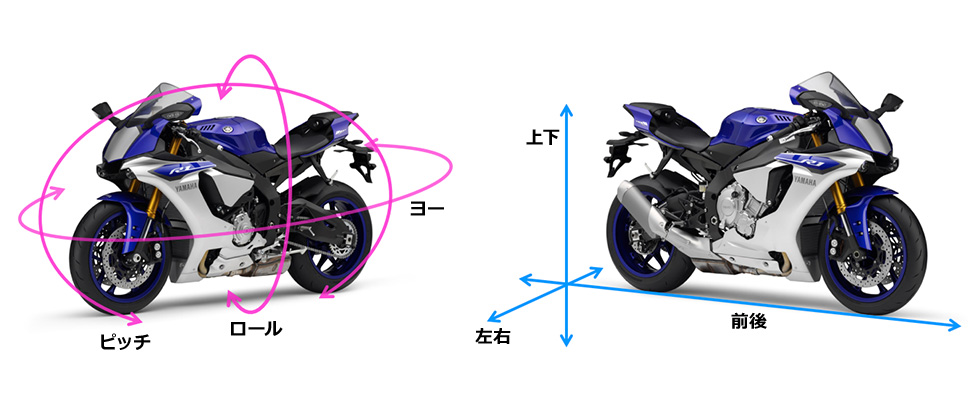
このモデルが誕生するまでバイクの電子制御システムは、エンジン系とボディ系というふたつの流れがありました。それが、ひとつに結びついたのが2015年「YZF-R1/YZF-R1M」(#1)です。その肝となるフィーチャーが6軸「IMU」(Inertial Measurement Unit)を搭載した電子制御システム(#2)です。走行中の車両の「前後」「左右」「上下」の3軸方向の加速度と、「ピッチ」「ロール」「ヨー」の3軸方向の角速度を検出し、その情報を瞬時に演算フィードバックし、エンジンと車体挙動の制御を行い、走りをサポートします。


この「YZF-R1」は一般市販車ですが、レースへの出場やレースでの”勝利”にフォーカスしたモデルです。レースにおいてライダー自身の力を引き出し、フェアな競争の中でトップを走ってもらうことが開発テーマでした。「レース向け高出力エンジンは、操作に対して過剰な反応があるのでは・・・」と心配する声もあるかもしれませんが、そんなマシン挙動をなるべく少なく抑え、必要以上の神経を使わずに操縦しやすく、不安感なく走れ、ライバルとの駆け引きに集中するための制御が入っています。
例えばレース中、ライダーの集中力が車両に50%、路面に30%、ライバルに残り20%が向けられているとすれば、その20%のエリアを増やし、フェアな駆け引きに集中して欲しいというのが開発意図です。開発走行テストでは、ラップタイム計測を重視しませんでしたが、そこには「タイムをみながら開発すると、結局マシンとマシンの争いとなり、ライダーとライダー、人と人の競争が成立しない」という判断がありました。
検出する情報は32bitのCPUにより8ms(1秒間に125回)で高速演算し、ヤマハ独自のセンサーハイブリッド推定技術により、高精度なバンク角検出や後輪の横滑りも推定。その効用は、マシンの傾き角に連動したトラクションコントロール機能(#3)、リアの横滑り情報の出力への反映、無駄のない発進加速性など多岐に渡ります。またIMUが検出した車両姿勢情報よりバンク角を推定し、ブレーキ性能を補正するユニファイドブレーキシステムも搭載。「YZF-R1M」には電子制御サスペンションを搭載、IMU及び各センサー情報に基づき、状況に応じ前後サスペンションの減衰力が最適に制御されます。サーキットはもちろん、一般路や峠道での“集中できる走り”に貢献する電子制御システムです。

鈴鹿8耐でデビューウイン
「YZF-R1/R1M」(#4)の開発陣は“開発の総仕上げ”として、2015年7月の鈴鹿8耐※に参戦。一般ユーザーが購入可能なパーツでのモデファイだけで臨む「SSTクラス」で優勝し、実力を示しました。
鈴鹿8耐は、“真夏の祭典”と呼ばれる国内最大のバイクイベント。2名または3名のライダーが1台のマシンを駆り、約1時間交代で8時間にわたって1周約5.8kmのコースを周回し速さを争います。2015年は誕生したばかりの「YZF-R1/R1M」を使い、11チームが参戦。開発陣が組んだチームは「team R1 & YAMALUBE」(#5)で、監督は本モデルのプロジェクトリーダーの藤原英樹。ライダーはヤマハ社員で開発に携わった時永真と藤原儀彦、それに欧州でヤマハ車のテストに携わるジェフリー・デ・フリースが加わる3名。決勝では8時間と49秒で194周を走り抜き、総合21位、SSTクラスでのデビューウインを飾りました。



※2015 FIM世界耐久選手権シリーズ "コカ・コーラ ゼロ" 鈴鹿8時間耐久ロードレース 第 38回大会
2015年鈴鹿8耐の詳細レポートはこちら↓
http://race.yamaha-motor.co.jp/sp/suzuka8h/news/2015/08/201508-5025.php