CONTRÔLEUR
Voici le contrôleur pour robots doté de fonctionnalités avancées. Choisissez le contrôleur idéal à partir de divers formats de saisie de commandes.

Cette tour de commande servant à actionner les robots Yamaha est un contrôleur de taille compacte au rapport performance/coût élevé qui met l’accent sur la sécurité et l’environnement. Toute une gamme de méthodes de commande, y compris le traçage de points E/S, le contrôle à distance, le train d’impulsion, et le contrôle en ligne peut être sélectionnée pour s’adapter à vos applications.
| TRANSERVO | FLIP-X | PHASER | ||||
|---|---|---|---|---|---|---|
| Moteur pas à pas | Petit servo T4L/T5L (24 V•30 W) |
Servo pour usage général (de 30 à 600 W) |
Moteur linéaire | |||
| 1 axe | Traçage de points E/S Contrôle à distance |
 |
 |
 |
 |
|
| Train d’impulsion |  |
 |
 |
 |
||
| Programme (langage Yamaha SRC) Traçage de points E/S Contrôle à distance Contrôle en ligne |
 |
 |
||||
| 2 axes | Programme (langage Yamaha BASIC) Contrôle E/S Contrôle à distance Contrôle en ligne |
 |
||||
 |
 |
|||||
| 3, 4 axes | Programme (langage Yamaha BASIC) Contrôle E/S Contrôle à distance Contrôle en ligne |
 |
||||
| jusqu’à 16 axes |
 RCX340 peut commander jusqu’à quatre robots (ou 16 axes)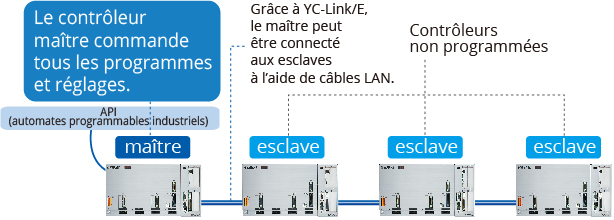 |
|||||
Caractéristiques
01![]() Positionneurs pour robot
Positionneurs pour robot
Il suffit de renseigner un numéro de point pour l’actionner.
Les positionneurs pour robot de la gamme TS peuvent être actionnés simplement en assignant des numéros de point et en saisissant la commande de démarrage. Ils peuvent également réaliser des mouvements de point et de poussée sans que l’écriture d’un programme soit nécessaire. La vitesse peut également être modifiée pendant le mouvement.
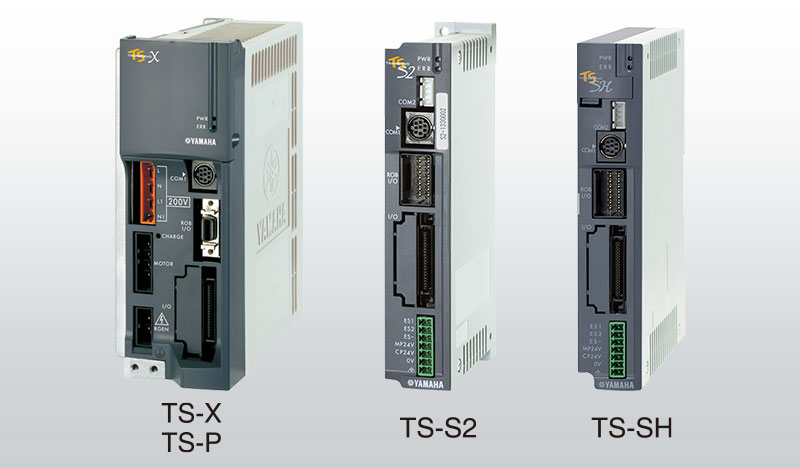
02![]() Pilotes pour robot
Pilotes pour robot
Pilotes d’entrée à train d’impulsion
Ces pilotes se sont débarrassés des opérations employant un langage robotique et les ont remplacées par la méthode d’entrée à train d’impulsion. Leur conception compacte leur permet de s’intégrer facilement aux pupitres de commande.

03![]() Contrôleurs pour robot
Contrôleurs pour robot
Plusieurs méthodes de contrôle
Différentes méthodes existent : programmes, traçage de point, contrôle à distance, contrôle en ligne, et plus encore. Les programmes emploient un langage semblable au Yamaha BASIC capable d’exécuter des opérations variées, qu’il s’agisse de tâches simples ou de sortie E/S et de branchement conditionnel.

04Logiciel complet
Les applications pour les contrôleurs sont conçues pour laisser à l’utilisateur le contrôle des robots, l’apprentissage de points, la création et la modification des programmes ainsi que la réalisation d’autres tâches, le tout avec un affichage sur écran simple.
*Téléchargement sur le web uniquement.

Yamaha Motor Europe N.V.
German Branch Office, Robotics Business
Hansemannstrasse 12, 41468 Neuss, Alemania
Telephone : +49 2131 20 13 520 /
Email : info-ymeim@yamaha-motor.de
Web: http://www.yamaha-motor-im.eu/