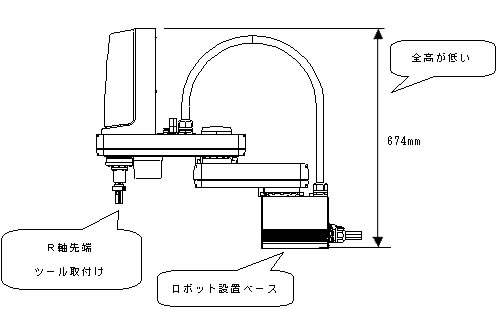
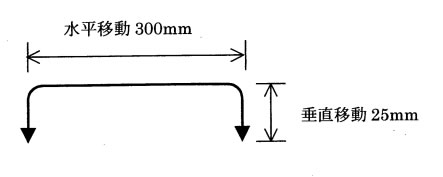
さらなる高スピード化を実現した低価格モデル ヤマハスカラロボット「YK500XG/YK600XG」新発売 2005年07月21日発表 ヤマハ発動機株式会社の社内カンパニーである「IMカンパニー」(所在地:静岡県浜松市、プレジデント:戸上常司)は、スカラ型ロボットYKシリーズYK500X/YK600Xをフルモデルチェンジし、新たに「YK500XG/YK600XG」の2モデルを開発。2005年9月1日より発売いたします。 ヤマハスカラ型ロボットは、ロボット取付け部の占有面積がコンパクトな水平多関節型ロボットで、作業の高速化や製造設備の省スペース化などの多様化するユーザーニーズに応える製品として、高精度・高速化・低価格をコンセプトに開発されました。 この「YK500XG/YK600XG」は、従来のヤマハスカラロボットの特徴を受け継ぎ、新たにスピード性能の向上と低価格化が図られたバリエーションモデルで、今後のスカラ型ロボット市場を拡大していくことが期待される製品です。 ヤマハスカラロボット「YK500XG/YK600XG」 名称 ヤマハスカラロボット「YK500XG/YK600XG」 発売予定日 2005年9月1日 価格 YK500XG 1,625,000円(消費税含まず) YK600XG 1,645,000円(消費税含まず) (専用コントローラ「RCX142」及びロボットケーブルを含む) 初年度販売計画 YK500XG/YK600XG 合計400台 製品の概要 「YK500XG/YK600XG」は、電子部品、機械部品の組み付け、移載・移動・搬送等の作業を自動、高速で行う産業用ロボットです。ロボットアームは、X軸、Y軸の2軸の旋回軸を持ち、その先端に上下軸(Z軸)と回転軸(R軸)を持つ構造で、先端にそれぞれの作業に最適なハンド等のツールを装備して運転いたします。「YK500XG/YK600XG」は、従来製品YK500X/YK600Xの特徴をより高い次元で改良したモデルで、システム設計の自由度を広げるコンパクト・軽量・高精度を維持しつつ、高速・サイクルタイムの短縮・高耐久性・メンテナンスフリー等の使いやすさをさらに向上させ、低価格を実現いたしました。 また、本体には、従来の鉄やアルミの鋳物製から新たにアルミの押し出し材を採用し、コストダウンを図りつつ、優れた機能性をイメージさせるシンプルなデザインを追求いたしました。 製品の主な特徴 ■コンパクト・軽量・省スペース アルミ押し出し材を採用し、本体重量を約20%軽減。さらに設置場所に高さ制限がある場合を考慮して全長の短いモーターを採用。ベースの高さを抑えて同クラスでは全高がもっとも低い設計としました。設置面積も200mm×178mmと小さく、システム設計の自由度が向上しています。 ■高精度 XY軸の位置決め精度:±0.02mmと従来製品と同等の精度を確保し、小型部品から比較的大きな部品まで、高精度で組み立てるアプリケーションが可能です。 ■高剛性・高速性 アームは、従来のアルミ鋳物製から新たにアルミ押し出し材を採用し、高い剛性を確保しました。同時にZ軸、R軸ともに従来のベルトを使用した回転力の伝達から新たに直結方式を採用しました。これにより10kgの可搬質量を維持しながら、最高速度をXY軸合成で約45%、Z軸35%、R軸で95%アップ。標準サイクルタイムは従来モデルと比較し、約20%向上しました。 ■使いやすさ ・ 位置検出器にアブソリュート型レゾルバを採用し、原点復帰レス機能を標準装備することで原点復帰動作が不要になり、立上げ時のタイムロスを最小に抑えました。 ・ ユーザー配線20本、配管φ6×3を本体に標準装備し、コンパクトなレイアウトの配管・配線が可能となりました。 ・ スカラロボットならではのフレキシビリティーと専用コントローラとの組み合わせで、複雑な動作のプログラムが簡単に行えます。 ■メンテナンスフリー Z軸及びR軸はモーターと減速機を直結し、駆動ベルトを無くしてベルトテンション再調整を不要としました。また、減速グリスに高寿命グリスを使用してグリス交換を不要としました。 ■低価格 全体構造の見直しにより、使用部品を約20点減らしてコストダウンを図り、従来モデルに比べて標準価格を10万円下げることが可能となりました。 主な用途 携帯電話をはじめとするハンディタイプIT製品やデジタル家電、特にフラットタイプディスプレ・カーエレクト・OA機器等の電気電子部品や、自動車等の機械部品の製造分野に幅広く使われるとともに、今後は、バイオや医薬品・医療機器の組立・医療検査工程等、さまざまな分野への応用が期待される製品です。 仕様諸元表 機種 YK500XG YK600XG 軸仕様 X軸 アーム長 200mm 300mm 回転範囲 ±130° Y軸 アーム長 300mm 回転範囲 ±145° Z軸 ストローク 200/300mm R軸 回転範囲 ±180° モーター X軸 400W Y軸 200W Z軸 200W R軸 200W 最高速 X、Y軸合成 7.1m/s 8.5m/s Z軸 2.3m/s R軸 1700°/s 繰り返し位置決め制度※1 X、Y軸 ±0.02mm Z軸 ±0.01mm R軸 ±0.005° 最大過般質量 10kg 標準サイクルタイム (2kg過般時)※2 0.4s 0.4s R軸許容慣性モーメント※3 1.2kgfcms2 ユーザー配線 0.2sq×20本 ユーザー配管 φ6×3 動作リミット設定 1.ソフトリミット 2.メカリミット (XYZ軸) ロボットケーブル 3.5m、オプション:5m、10m コントローラ RCX142 本体質量 30kg 31kg ※1:周囲温度一定時の値 ※2:水平方向300mm、垂直方向25mm往復、粗位置決め時。 ※3:加速度係数の設定に制限があります。 [ご参考] ● スカラロボット(水平多関節ロボット)とは・・・ SCARA(スカラ)とはSelective Compliance Assembly Robot Armの略で、水平方向(XY方向)だけにコンプライアンス(やわらかさ)をもち、上下方向は剛性が高いという特徴を持つ、主に組み付け作業の自動化を目的に作られたロボットです。現在は、その動作スピード性能から、搬送(ピック&プレイス)作業にも有効なロボットとしても様々な生産現場で使用されています。また、小さい設置スペースに比べて大きな動作領域も魅力で、ロボット周りのレイアウトの自由度が大きいのも特徴です。 ● 標準サイクルタイム測定動作パターン