ニュートンの「運動3法則」にみる“技と術”
ヤマハ発動機の技術ストーリーをご紹介します。
ヤマハ発動機の技術は、「パワートレイン」「車体・艇体」「電子制御」に大きく分けることができます。本サイト“技と術”では多くの例を掲載していますが、その源流を辿ると17-18世紀の数学・物理・天文学者であるアイザック・ニュートンに遡ります。
生家にあるリンゴの実が落ちるのを見て”重力”の存在に閃いたイギリス人。没後約300年の今もニュートン力学は、身の回り品から医療・宇宙開発におぶまであらゆる事象を説明する基本となっています。
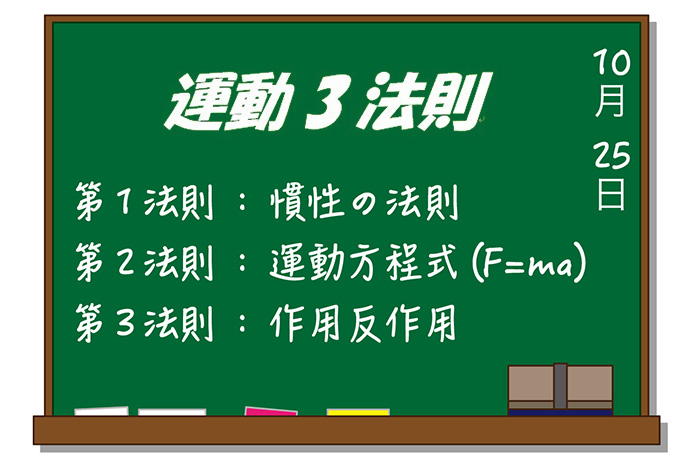
ニュートン力学とは運動3法則※1と呼ばれ、黒板にあるように、①「慣性の法則」②「運動方程式」③「作用反作用の法則」(#1)が知られています。では、これらの法則とヤマハ製品の技術にはどんな関係があるのでしょう・・・。
※1
【第1法則:慣性の法則】
止まっている物体は力を加えない限り止まり続け、動いている物体は力を加えない限り動きを続ける法則。物体はその時点での状態を保とうとする性質があるということ。
【第2法則:運動方程式】
運動の”力”(Force)を導き出す式。《”力”とは物体の質量(Mass)に、それを動かす勢い(加速度:Acceleration)を乗じたもの》であることを裏付ける式。よってF=m×a、即ち「F=ma」と記述される。
【第3法則:作用反作用の法則】
「作用」とは物体に力を加えること。力を加えられた物体は、その作用とは反対向きかつ同じ値の力=「反作用」を生み出すという法則。

ピストンにみる「運動方程式」(F=ma)
ヤマハは創業以来、数多くのエンジンを開発、実用化してきました。それぞれ特徴がありますが、その多くは全て「慣性の法則」と「運動方程式」が基本となっています。
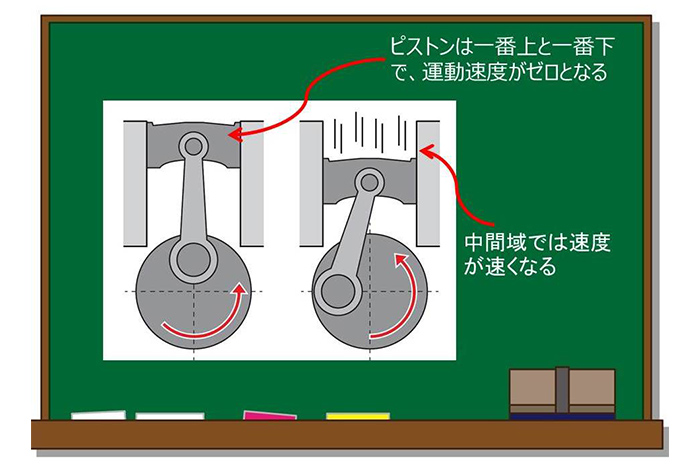
身近なエンジンの動きから、第2法則の「運動方程式」を見てみましょう。一定の速度で走行中、エンジンも一定の速度でスムーズに回転していますが、実はピストンの動きは同じ速さで上下していません。シリンダーの中で上下運動するピストンは、上下運動の「一番上」と「一番下」のところで速度はゼロになり、中間域では速度が速くなっています。(#2)つまり速度の変化が起こっており、それを加速度と言います。そしてその加速度が最大になるのは、速度がゼロになる瞬間です。
金槌で釘を打つイメージが分かり易いでしょう。金槌が釘に当たる瞬間、金槌の速度はゼロ。この時こそ加速度が最大となりその結果“力”が最大になっています。これは、金槌の頭部分の重量が、何倍にも増えたかのようになります。(#3)
つまり、ピストンの力を「F=ma」式の「F・m・a」に当てはめてみるとどうでしょう。「F」はピストンが発生する力(慣性力)、「m」はピストン質量、「a」 は加速度です。「m×a=ピストンが発生する力」です。ですから仮にピストンの質量を半分にできると、ピストンが発生する力も半分になるということが言えます。
「ピストン軽量化は、ピストンの往復運動質量低減となる」という説明をよく目にします。それはピストンが発生する力を少なくしていることで、《ピストンが軽ければコンロッドなど各エンジン構成パーツへのストレスが軽減され、高回転化、振動・メカノイズ低減、信頼性向上など多くのメリットに繋がる》ということなのです。
ピストンを軽量化するという設計ベクトルは、このようにニュートンの第2法則である「運動方程式」から導かれたものなのです。高回転を多用するモーターサイクル用エンジンで、軽いアルミ鍛造※2ピストンを多用する理由が、ここにあります。
※2:鍛造(たんぞう)
エンジンの心臓、ピストンの材料はアルミで作られています。アルミをピストンの形にするには2通りの方法があります。高温にしてドロドロに溶かして型に流しみ冷やして固める方法。これは鋳造(ちゅうぞう)と呼ばれます。もうひとつはアルミに熱を加えながら型に押し込んで作る鍛造です。鍛造はアルミを溶かさずに形にするので、アルミ組織の密度が維持され薄く、また軽く仕上げることができます。
鍛造ピストンの詳細は・・・
https://www.yamaha-motor.co.jp/mc/yamaha-motor-life/2014/11/post-206.html
エンジンに見る「慣性の法則」
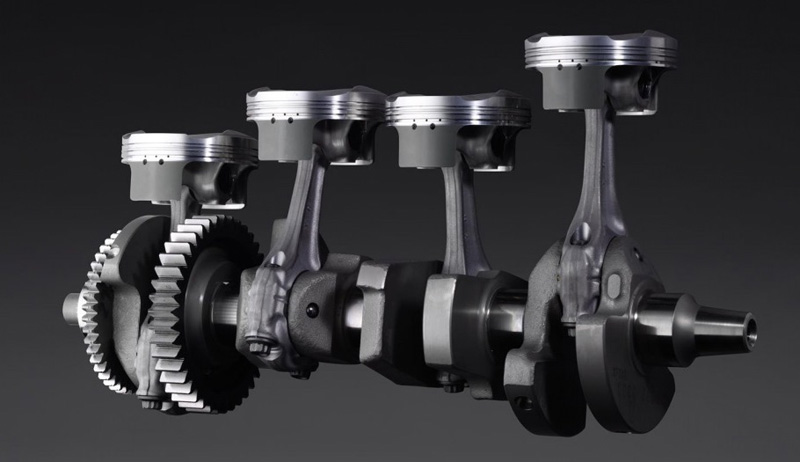
「慣性の法則」と「運動方程式」で語れるヤマハのエンジンは他にもあります。船外機からYZF-R1まで採用されるオフセットシリンダー、小排気量向けの“BLUE CORE(ブルーコア)”、YZF-R1やMT-10の“クロスプレーンクランクシャフト”などですが、ここではクロスプレーンクランクシャフト (#4)に触れておきましょう。
ご存知の通り爆発で生まれるピストンの動きは、コンロッドを経てクランクの回転に変換されます。このクランク回転は燃焼により発生する“力”だけではないのです。慣性トルクと呼ばれ、燃焼状況に関わらずクランク回転により発生する力、つまりピストンの慣性力がクランクを回転させる力もあります。これは慣性トルクと呼ばれます。
またクランク1回転中、慣性力は増速したり減速したりしています。つまり慣性トルクには変化が発生します。この慣性トルクの変化、変動を解消し、リニアな特性を引き出そうというのがクロスプレーンクランクシャフトの狙いです。
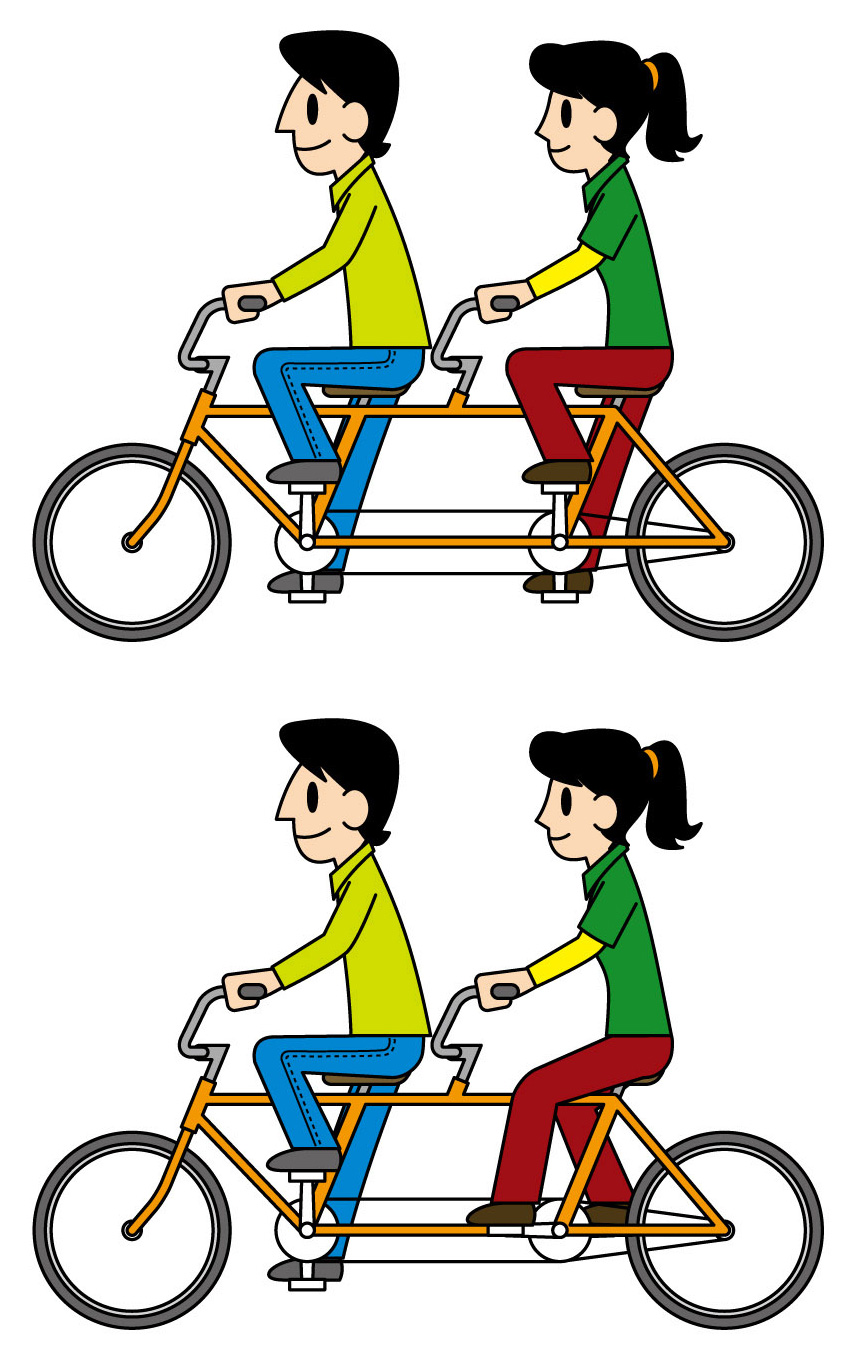
イメージを2人乗りタンデム自転車で説明しましょう。(#5)上の絵では、前後の人のペダル位置がいつも同じ位置にあります。下の絵はそれぞれペダルの位置が異なっています。上の絵では、漕ぎ出してから速度がのるまでに少し時間がかかるイメージなのに対し、下の絵では前後でペダルの位置が90度違うので、滑らかに発進していくイメージを見ることができます。イメージとしては、上の絵が従来の直列4気筒エンジンで、下の絵がクロスプレーン型クランクシャフトの4気筒エンジンという訳です。
こうした仕組みで、滑らかなクランク回転をもたらしているのですが、「物体はその時点での状態を保とうとする性質がある」という慣性の法則を踏まえ、それを徹底追求して誕生した仕組とも言えるのです。
クロスプレーン型クランクシャフトの詳細は・・・
https://www.yamaha-motor.co.jp/mc/yamaha-motor-life/2014/11/post-224.html
車体にみる「作用反作用の法則」
「車体・艇体」技術にもニュートン力学における第3法則「作用反作用の法則」に基づく設計が見てとれます。「作用反作用の法則」をごく簡単にイメージするなら、プールの中など水中で友達を押したとき、自分もその反動で反対方向に動いてしまう現象が分りやすいでしょう。(#6)さて、ヤマハ製品で見るとどうでしょう。
その代表がLMW(リーニング・マルチ・ホイール)。“複数輪でもカーブでボディを傾けて楽しく走りたい”という開発者の想いが発端となって開発された技術ですが、ヤマハが提供する“ひろがるモビリティ”のひとつとなっています。
LMWでは前輪左右のタイヤが状況に応じ、シーソーのような動きを示します。(#7)片方が上がれば一方は車輪が下がっていくのです。「パラレログラムリンク」と呼ぶ平行四辺形のパーツ(リンク)がこの作業を受け持ちます。平行四辺形は、片方から力を加えても常に平行四辺形で、まさに作用反作用の事例です。(#8)物体は押すと押し返され、引っ張ると引っ張り返されるのです。その原理を原点から見直し、解析と実験を経てパラレログラムリンクの構造に辿り着き、LMWが完成したのです。
一方、地面とタイヤの間でも作用反作用が常に起こっています。そのおかげで加速したり、減速したり出来るのです。(#9)またサスペンションにはスプリングがありますが、これも作用反作用で地面からの凹凸を吸収したり、車体まわりには作用反作用がいたるところで生じています。
このように「TRICITY」や「NIKEN」(#10)に採用されているLMWにも、ニュートン力学を極める精神が流れているのです。





電子制御を支える「運動方程式」
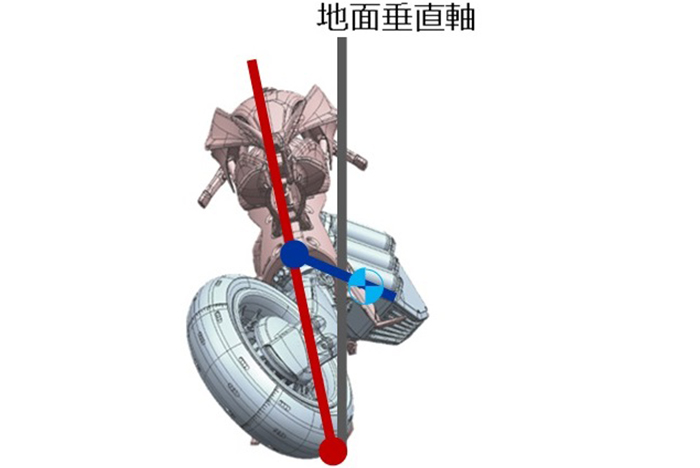
東京モーターショー2017で注目を浴びた参考出展車「MOTOROiD」(#11)は、新しい感動体験の創出を目的に、知能化技術というインテリジェンスを用いて、「人とマシンが共響するパーソナルモビリティ」を目指す概念検証実験機です。知能化と自律技術を適用した高度なバランス制御を実装していて、マシンが自らの状態をセンシングして重心移動によって起き上がり、そのまま不倒状態を保ちます。
この「MOTOROiD」を支える技術のひとつが“AMCES※3”(アムセス)を中心とした新たなレイアウト・構造です。“AMCES”とは、①車両の重心、②前輪接地点、③後輪接地点、この三点の位置関係を電子制御している機構と言えます。ここにもニュートン力学が関わっています。その原理は、「ほうきバランス」(バランス棒ゲーム)のようなものです。(#12)
そもそも「バイクは何故倒れるのか?」 この当たり前で誰も考えないようなことを、ニュートン力学の原点から見直したところに私たちヤマハの“技と術”があります。 AMCESの開発でエンジニアが導き出したのは、「転倒の運動方程式」という数式でした。その数式を使えば、バランスが崩れることによる転倒の原理を解明でき、それから逆算して自ら起き上がれる仕組みを構築。それを電子制御したのです。その具現化のひとつが「MOTOROiD」に搭載されたAMCESです。
「MOTOROiD」では、センサーからの信号は2,000分の1秒以下の精度でメイン統合基盤に送られ、この統合基盤からの指令を受けたアクチュエータが、高い精度でAMCES軸を回転させて重心をコントロールします。(#13)制御の前提になっているのはニュートンの“運動方程式”です。物を動かそうと力を加えると、物体には加速が発生するという法則を踏まえたうえでの開発なのです。
ニュートン力学は、世紀を超えて数々のヤマハ製品に反映され続けています。ある技術者は、こう言っています。「ニュートン力学こそ究極の開発手法かもしれない・・・」。
※3:AMCES:アムセス(Active Mass CEnter control System)。二輪の車体を電子制御で安定化することを目指した技術。車体をアクティブ制御する事で、常に車両の姿勢を最適化するシステム。
「MOTOROiD」の詳細は・・・
https://global.yamaha-motor.com/jp/design_technology/technology/electronic/011/